Beyin-bilgisayar arayüzü
Beyin-bilgisayar arayüzü veya zihin-makine arayüzü veya beyin-makine arayüzü, beyin ile dış bir cihaz arasındaki doğrudan iletişim yoludur. Beyin-bilgisayar arayüzü genellikle insanoğlunun bilişsel veya duyusal motor fonksiyonlarına yardımcı olmak veya onları tamir etmek için kullanılır.
Beyin-bilgisayar arayüzü araştırmaları ilk kez 1970'li yıllarda Ulusal Bilim Vakfı tarafından sağlanan bir hibeyle ve DARPA girişimiyle Kaliforniya Üniversitesi'nde başladı.[1] Beyin-bilgisayar arayüzü ifadesi bu çalışmaların ardından yayınlanan makalelerde ilk kez kullanılarak böylelikle bilim literatürüne girmiş oldu. Beyin-bilgisayar arayüzü araştırmaları daha çok duyma, görme ve hareket gibi duyuları onarmak üzere nöroprotez uygulamalarına odaklandı.
Beynin kortikal plastisitesi nedeniyle, implante edilmiş protezlerden gelen sinyaller, adaptasyondan sonra, beyin tarafından doğal sensör veya efektör kanalları gibi kullanılabilir.[2] Yıllarca süren hayvan deneylerinin ardından, insanlara implante edilen ilk nöroprotez cihazlar 1990'ların ortalarında ortaya çıktı.
Günümüzde çok çeşitli beyin - bilgisayar arayüzü uygulamaları bulunmaktadır. Bu uygulamalar başlıca kelime işleyiciler, uyarlanmış web tarayıcıları, tekerlekli sandalye ve nöro protezlerin kullanımı olarak sayılabilir.
TARİHÇE
Beyin - bilgisayar arayüzlerinin (BBA) tarihi, Hans Berger'in insan beyninin elektriksel aktivitesini keşfi ve elektroensefalografi (EEG)'in geliştirilmesiyle başlar. Berger ilk kez 1924 yılında, EEG aracılığıyla insan beyninin faaliyetini kaydetmeyi başarmıştır. Yaptığı çalışmada EEG izlerini analiz ederek Berger dalgası veya alfa dalgası gibi osilatuar aktivitelerini tanımlamıştır. Ardından, 1964 yılında Dr. William Gray Walter, beyin - bilgisayar arayüzü alanındaki ikinci çalışmayı yürütmüştür. Bu çalışma kapsamında, hastanın beyin motor bölgesine doğrudan elektrot bağlanmış ve hastadan önündeki sunumu değiştirmesi için bir düğmeye basmasını istemiştir.[3]
Bu çalışma ile Dr. Walter, beyin aktivitesinin hastanın butona basmaya niyetlendiğinde ortaya çıktığını ve bu aktiviteden sonra gecikmeli olarak projektörün hareket ettiğini gözlemlemiştir. Bu gözlem, beyinde kasları kontrol edecek sinyalin (komutun) kas hareketinden önce üretildiğini göstermektedir.[4] 1973 yılında UCLA Profesörü Jacques Vidal, yaptığı çalışmada BCI (Brain Computer Interface) terimini türetmiş ve bu konuda ilk hakemli yayını yayınlamıştır. 1988 yılında Steve Bozinovski, Mihail Sestakov ve Liljana Bozinovska tarafından EEG kullanılarak robot kontrolü üzerine bir çalışma yapılmıştır. Çalışmada, bir robota invazif olmayan (cerrahi işlem gerektirmeyen) EEG kontrolü sağlanarak çizilen çizgi boyunca robotun otonom hareket etmesi beklenmiştir. 2010 yılında yapılan bir çalışmada, sinir uyarımının işlevsel bağlantıyı ve ilgili davranışları sinaptik etkinliğin moleküler mekanizmalarının modülasyonu yoluyla geri kazanma potansiyeli önerilmiştir. Son yıllarda da BBA'ların hasta bireylerin yanı sıra sağlıklı bireyler için de geliştirilen farklı uygulamaları dikkat çekmeye başlamıştır.
Beyindeki Elektrik ve Manyetik Alanlar
Anatomi ve Fonksiyonu
Beyin, sinir sisteminin komuta merkezidir. Duyu organlarından aldığı bilgileri işler, birleştirerek koordine eder ve üretmiş olduğu talimatları kaslara ve organlara gönderir. Beyin, temelde üç ana bölümden oluşur: beyin (serebrum), beyin sapı ve beyincik (serebellum).
Bir insanda serebral korteks, yaklaşık olarak 15-33 milyar nöron içerir; bunların her biri birkaç bin nöronla sinaptik olarak bağlantılıdır. Beyin veya vücudun uzak bölümlerinde yer alan nöronlar birbirleriyle iletişimi aksiyon potansiyelleri ile kurmaktadırlar. Bellek, algılama, dikkat, farkındalık, düşünme ve bilinç gibi konularda serebral korteks önemli bir rol oynamaktadır.
Beyin yapısal olarak 4 bölümden oluşur: Frontal lob, parietal lob, oksipital lob ve temporal lob. Frontal lob akıl yürütme, planlama, konuşma ve problem çözme gibi işlevlerden sorumludur. Parietal lob yönelim ve algılama gibi işlevleri yerine getirmektedir. Oksipital lob görsel işlemeyi gerçekleştirmektedir. Temporal lob ise işitsel uyaranları algılama, hafıza ve konuşmanın algılanması gibi işlevlerden sorumludur.
Nöron Aktivitesi
Merkezi sinir sistemindeki sinir hücreleri glia hücreleri olarak adlandırılmakta ve beyni kaslara ve duyu organlarına bağlamaktadır. Bir nöron akson, dendrit ve hücre gövdesinden oluşur. Aksonlar bilgi aktarımını iyonlar sayesinde elektrokimyasal olarak yaparlar. Sinir sisteminde, hücrenin içinde ve dışında bulunan önemli iyonlar Na+,K+,Ca+ ve Cl-'dir.
Hücrelerin zarında bulunan protein molekülleri bir kapı görevi görür ve sinir hücrelerinden bazı iyonların geçmesine izin verirken diğer iyonların geçişini engeller. Akson düğümündeki voltaj değeri belirli bir eşiğin üzerine çıktığında hücrenin somasında aksiyon potansiyeli üretilmiş olur. Bu sinyal genel olarak -85 ile 35 mV arasında ve frekansı 100 Hz'den düşüktür. Elektrik akımı bu şekilde bir sinir hücresinden diğerine aktarılır.[5]
Beyindeki Elektrik ve Manyetik Alanlar
BBA'nın genel işlevleri beyin sinyallerini yakalamak, alınan sinyalleri işlemek, sınıflandırmak ve bu sinyalleri kontrol için kullanmaktır. Doğrudan bir beyin arayüzü, fiziksel hareket gerektirmeden doğrudan insan beyninden gelen komutları kabul eder ve bir bilgisayarı veya diğer teknolojileri çalıştırmak için kullanılabilir. Buradaki doğrudan beyin arayüzü yaklaşımı, belirli hareketlere karşılık gelen ERP'leri (Event-Related Potential - Olayla İlgili Potansiyel) tespit etmek için tetikleyici ortalamalı elektrokortikografi (ECoG) segmentlerinin sürekli ECoG ile çapraz korelasyonunu kullanır.[6] Bu yaklaşımının seçimi, kısa vadeli tek anahtarları doğrudan beyin arayüzü geliştirme hedefi ve uzun vadeli çok kanallı doğrudan beyin arayüzü geliştirme hedefi ile yapılmıştır.
Sinaptik iletim sırasında nöronların dentritlerinde akan iyonik akımlar dış ortamda elektrik ve manyetik alan oluşturur. Aksiyon potansiyeli hücreler arası bir akıma neden olur ve bu akımın oluşturduğu elektrik alan elektroensefalografi (EEG) cihazı ile, manyetik alan ise manyetoensefalografi (MEG) cihazı ile ölçülür ve kaydedilir. Çapraz korelasyon, bir tespit yöntemi olarak seçilmiştir. Bunun nedeni, EEG ve ECoG'de insan duyusal uyarılmış potansiyellerini tespit etmek için başarıyla kullanılmasıdır. Ayrıca, çapraz korelasyon nispeten basit, iyi anlaşılmış bir süreçtir ve gerçek zamanlı hesaplama ile kolayca uygulanabilir.[7]
Beyin Bilgisayar Arayüzü Sınıflandırması
Beyin - bilgisayar arayüzü sistemleri güvenilirlik, invazivlik ve senkronizasyon olmak üzere üçe ayrılır.
Güvenilirlik: Bağımlı BBA ve Bağımsız BBA
Bağımlı BBA, denekten belirli bir düzeyde motor kontrolü gerektirirken, bağımsız BBA herhangi bir kontrol gerektirmez.[8] Bağımlı BBA, deneğin video oyunlarını oynamak ve tekerlekli sandalyeyi hareket ettirmek gibi olayları daha kolay yapmasına yardımcı olur.
İnvazivlik: İnvaziv BBA, Non-invaziv BBA ve Yarı İnvaziv BBA
BBA, beyin aktivitesinin ölçülme şekline göre invaziv, non-invaziv ve yarı invaziv olarak sınıflandırılır. İnvaziv BBA'da, mikroelektrotlar beyin cerrahisi sırasında beyne, kafatasının altına implante edilir.[9] Bu durumda, sinyal yüksek kalitede üretilebilir, ancak zamanla yara dokusu oluşumuna eğilimli olabilir ve sinyal kaybolabilir. İnvaziv teknolojiler bir kez yerleştirildikten sonra hareket ettirmek mümkün değildir.[10]
Non-invaziv BBA’da, sinyaller kafa derisine nüfuz etmeden kaydedilir.[11] Bu durumda sinyaller düşük kalitede olabilir, bununla birlikte non-invaziv BBA, ameliyat gerektirmediğinden dolayı halen tercih edilmektedir.
Yarı invaziv BBA’da, elektrotlar kafatasının altına implante edilir ve beyin sinyalleri Elektrokardiyografi (ECoG) kullanılarak kaydedilir.
Senkronizasyon: Senkron BBA ve Asenkron BBA
BBA sistemi, kullanıcının sistemle etkileşimi belirli bir zaman diliminde yapıldığında senkron olarak adlandırılır. Başka bir deyişle, sistem özneyi belirli bir zaman diliminde kendisiyle etkileşime girmeye zorlamalıdır. Aksi takdirde, sistem söz konusu sinyalleri alamayacaktır. Öte yandan asenkron BBA'da, denek herhangi bir zaman diliminde zihinsel görevlerini yerine getirebilir ve sistem onun zihinsel faaliyetlerine tepki verir. Bu nedenle, özne herhangi bir zaman diliminde faaliyetini yapmakta özgürdür.
Hayvanlarda BBA Araştırmaları
Birçok laboratuvar çalışmasında, maymun ve fare beyin korteksinden sinyallerin kaydedilmesi başarılmıştır. Bu sinyaller, hareket üretmek amacıyla beyin - bilgisayar arayüzlerinde kullanılmıştır. Maymunlar, görevi düşünerek ve görsel geri bildirimleri algılayarak, motor çıktıya gerek duymadan basit görevleri gerçekleştirmişlerdir. Bu görevler, bilgisayar ekranındaki yönlendirmeleri takip etmek ve robotik kolları konumlandırma gibi eylemleri içermektedir.
1969 yılında, Fetz ve arkadaşlarının yaptığı çalışmada maymunların nöral aktiviteyle bir biyo-geribildirim ölçer kolunun eğilimi kontrol etmeyi öğrenebileceği ilk kez gösterilmiş oldu.
1980 yılında Johns Hopkins Üniversitesinde yapılan bir çalışmada, maymunların kollarını hangi yönde hareket ettirdiklerini belirleyen tek motor korteks nöronlarının elektriksel tepkileri arasında matematiksel bir ilişki bulunmuştur.
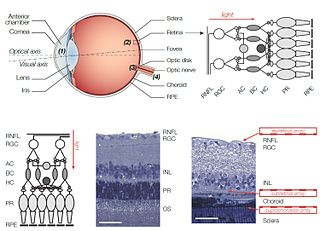
1999'da Kaliforniya Üniversitesi'nden Yang Dan'ın yürütücülüğünde ilerleyen çalışmada, kedi tarafından görülen görüntüleri yeniden üretmek için nöron ateşlemesi tekniği uygulanmıştır. Çalışmada, tüm duyusal girdileri entegre eden beyin bölgesi olan talamus için keskin gözlü kedilere elektrotlar yerleştirildi.
Retinadan gelen sinyallerin kodlanarak talamus lateral genikulat çekirdeği bölgesinde 177 beyin hücresi hedeflenen çalışmada kedilere sekiz kısa film gösterildi ve nöron ateşlemeleri kaydedildi. Matematiksel filtreler kullanılarak, deşifre edilen sinyaller ile kedilerin gördüğü sahneleri ve hareket eden nesneleri yeniden oluşturmayı başardılar.
1990'larda fareler üzerinde ilk çalışmayı yapan Nicolesis ve arkadaşları, baykuş maymunlarında beyin aktivitesini deşifre eden BBA'lar geliştirdiler ve bu cihazları, robot kolları hareket ettirmek için maymun hareketlerini yeniden üretmek için kullandılar.
2000'li yıllara gelindiğinde, Nicolesis ve arkadaşları, bir maymunun bir joystick'i kullanırken veya yiyeceğe uzanırken, bu hareketleri yeniden üreten bir BBA kurmayı başardılar. BBA, gerçek zamanlı çalışıyordu ve internet protokolü (IP) üzerinden başka bir robota uzaktan kontrol erişimi sağlıyordu. Fakat maymunlar kolun hareketini göremediği için herhangi bir geri bildirim alınmıyordu ve açık döngü BBA durumu oluşuyordu.
İnsanlarda BBA Araştırmaları
İnvaziv BBA araştırmaları, hasarlı görüşü onarmayı ve felçli insanlar için yeni işlevsellikler sağlamayı hedeflemektedir. İnvaziv BBA'lar, nörocerrahi sırasında doğrudan beynin gri maddesine implante edilir. Entegre edilen invaziv BBA'lar gri maddede bulundukları için, invaziv cihazlar en yüksek kalitede sinyallerini üretirler fakat vücut, beyindeki yabancı nesneye tepki olarak yara dokusu oluşumuna neden olabilir. Bu durum da sinyalin zayıflamasına veya sinyalin hiç oluşmamasına neden olabilir.
İnsanlarda BBA araştırmalarında, doğrudan beyin implantları, doğuştan olmayan (edinilmiş) körlüğü tedavi etmek için kullanılmıştır. Yetişkinlik yıllarında kör olan Jerry isimli bir adama 1978 yılında doğrudan beyin implantı takıldı. Deneğin görsel korteksinin üzerine yerleştirilen implant sayesinde, ışık görme hissi kazanıldı. Bu sürecin bir sonraki aşamasında, gözlüklere monte edilmiş kameralar aracılığıyla sinyallerin implanta gönderilmesi planlandı.
Kaynakça
- ^ Vidal, JJ (1973). "Toward direct brain-computer communication". Annual review of biophysics and bioengineering 2: 157–80.
- ^ "A direct brain interface based on event-related potentials". 11 Ekim 2016 tarihinde kaynağından arşivlendi.
- ^ Graimann, B., Allison, B., & Pfurtscheller, G. (2010). Brain–computer interfaces: A gentle introduction. In Brain-computer interfaces: Revolutionizing human-computer interaction (pp. 1-27). Berlin, Heidelberg: Springer Berlin Heidelberg.
- ^ KAYIKÇIOĞLU, T., MALEKI, M., & KETENCİ, S. (2018). Beyin-Bilgisayar Arayüzü. TMMOB Elektrik Mühendisleri Odası, BiyomediNal Mühendisliği ve Uygulamaları.
- ^ Sanei, S., & Chambers, J. A. (2013). EEG signal processing. John Wiley & Sons.
- ^ Levine, S. P., Huggins, J. E., BeMent, S. L., Kushwaha, R. K., Schuh, L. A., Rohde, M. M., ... & Smith, B. J. (2000). A direct brain interface based on event-related potentials. IEEE Transactions on Rehabilitation Engineering, 8(2), 180-185.
- ^ Levine, S. P., Huggins, J. E., BeMent, S. L., Kushwaha, R. K., Schuh, L. A., Passaro, E. A., ... & Ross, D. A. (1999). Identification of electrocorticogram patterns as the basis for a direct brain interface. Journal of clinical neurophysiology, 16(5), 439.
- ^ Allison, B., Graimann, B., & Gräser, A. (2007, June). Why use a BCI if you are healthy. In ACE Workshop-Brain-Computer Interfaces and Games (pp. 7-11).
- ^ Nakasaki, H., Mitomi, T., Noto, T., Ogoshi, K., Hanaue, H., Tanaka, Y., ... & Hakomori, S. I. (1989). Mosaicism in the expression of tumor-associated carbohydrate antigens in human colonic and gastric cancers. Cancer research, 49(13), 3662-3669.
- ^ Tan, D., & Vanderdonckt, J. (2010). Human-Computer Interaction Series. Human-Computer Interaction Series, 10, 978-1.
- ^ Millan, J. R., Renkens, F., Mourino, J., & Gerstner, W. (2004). Noninvasive brain-actuated control of a mobile robot by human EEG. IEEE Transactions on biomedical Engineering, 51(6), 1026-1033.