Uzay aracı itki sistemi

Uzay aracı itki sistemi ya da Uzay aracı sevk sistemi, uzay aracını ve uyduları ivmelendirmekte kullanılan her türlü yönteme verilen addır. Pek çok farklı yöntem bulunmaktadır. Her yöntemin bazı sakıncaları ve üstün tarafı vardır ve uzay aracı sevki etkin bir araştırma alanıdır. Ancak, günümüzdeki pek çok uzay aracı, aracın arkasından/geri tarafından bir gazı roket motoru çıkışı yüksek hızda geçirmek suretiyle itki/sevk üretir. Bu çeşit bir motora roket motoru denmektedir.
Günümüzdeki tüm uzay araçları, fırlatma için, (sıvı yakıtlı ya da katı yakıtlı) kimyasal roketler kullanmaktadılar, ancak (Pegasus roketi ve SpaceShipOne gibi) bazı roketler ilk aşamaları sırasında hava soluyan motorlar kullanmışlardır. Uyduların çoğunda Yörünge korunumu için basit güvenilir kimyasal iticiler (sıklıkla Tek-yakıtlı roketler veya resistojet roketler kullanılır ve bazı uydular ise yönelim denetimi için reaksiyon tekerlekleri kullanır. Sovyet bloğu uyduları, elektriksel itki sistemlerini onlarca yıl boyunca kullanmışlardır ve daha yenice olan, dünya yörüngesindeki, batılı uzay araçları bu sistemleri kuzey-güney yörünge korunumu ve yörünge yükseltimi için kullanmaya başlamışlardır. Gezgenler arası araçlar çoğunlukla, kimyasal roketler de kullanmaktadır; ancak birkaçı, değişik türdeki elektrikli sevk sistemleri olan, iyon iticilerini ve Hall etkisi iticilerini çok başarılı bir şekilde kullanmışlardır.
Gereksinimler
Yapay uyduların yörüngeye fırlatılmaları gerekmektedir ve oraya vardıktan sonra, dünyanın etrafında dönecek şekilde, doğal (nominal) yörüngeye oturtulmaları gerekmektedir. Hedeflenen yörünge elde edildikten sonra, Dünya'ya, Güneş'e ve muhtemelen bazı göksel nesnelere doğru düzgün olarak çevrilmiş olabilmeleri için, genellikle bir çeşit yönelim denetimi (İng: attitude control) sistemine ihityaç duyarlar.[1] Uydular ayrıca, ince atmosferden dolayı sürüklemeye maruz kalırlar, bu yüzden yörüngede uzun bir süre kalabilmek amacıyla küçük düzeltmeler yapmak için bir çeşit itki sistemi gerekmektedir (yörünge sabitleme—İng:orbital stationkeeping).[2] Pek çok uydunun zaman zaman yörünge değiştirmesi gerekebilmektedir ve bu da itki gerektiren bir işlemdir.[3] Bir uydunun yörüngesini ayarlama yeteneği (yakıt bitmesi, arıza vs sebebiyle) ortadan kalkınca, uydunun kullanışlılığı biter.
Dünya yörüngesinden daha uzaklara gitmek üzere tasarlanan bir uzay aracının da itki sistemine ihtiyacı olacaktır. Aynı uydular gibi Dünya atmosferinin dışına fırlatılmaları gerekmektedir. Atmosferin dışına ulaştıktan sonra yörüngeyi terkederek uzayda dolaşmaları gerekmektedir.
Gezegenlerarası yolculuk (İng:interplanetary travel) için, bir uzayaracının motorlarını kullanarak Dünya yörüngesini terk etmelidir. Bunu yaptıktan sonra, bir şekilde hedefine doğru yol almalıdır. Günümüzdeki gezegenler-arası uzayaracı bunu kısa-süreli gidiş doğrultusu düzeltmeleriyle gerçekleştirir.[4] Bu düzeltmeler arasında, uzay aracı basitçe, hedefi doğrultusunda serbestçe düşer. Dairesel bir yörüngeden benzer başka bir yörüngeye en çok yakıt-tasarruflu geçiş yöntemi, Hohmann aktarma yörüngesi ile olan yöntemdir: uzayaracı Güneş etrafında kabaca dairesel olan bir yörüngeye başlar. Yapılacak hareketin doğrultusunda oluşturulacak kısa süreli bir itki sonucunda, uzayaracını Güneş etrafında eliptik bir yörüngeye girecek şekilde hızlandırır ya da yavaşlatır. Bu eliptik yörünge ilk dairesel yörünge ile hedefe ulaşmak üzere girilecek olan son dairesel yörünge arasındadır ve bu yörüngelere teğettir. Uzayaracı hedefine ulaşana kadar bu eliptik yörünge boyunca serbestçe düşer, hedef varırken hedefinin yörüngesine girebilmek için yine kısa süreli bir itki oluşturarak hızlanır ya da yavaşlar.[5] Uzay-hava freni (İng: aerobraking) veya uzay-hava zaptı (İng: aerocapture) gibi özel yöntemler de bazen bu son yörüngesel düzeltme işlemi için kullanılırlar.[6]

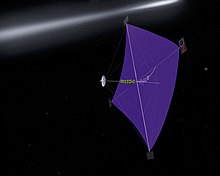
Güneş yelkeni gibi bazı uzayaracı itki yöntemleri çok düşük ancak tükenmeyen itki sağlarlar;[7] bu yöntemlerden birini kullanacak olan bir araç çok farklı bir hareket doğrultusu izleyecektir, ya aracı hareket yönünün tersine sürekli olarak hareket ettirerek Güneş'e olan uzaklığını azaltacak ya da aracı sürekli olarak hareket yönüne doğru hareket ettirerek Güneş'e olan uzaklığını artıracaktır. Bu yöntem Japon IKAROS (İng: IKAROS) güneş yelkeni uzayaracı ile başarılı bir şekilde test edilmiştir.
Yıldızlararası yolculuk için kullanılacak olan uzayaraçları da bir itki sistemine ihtiyaç duyacaklardır. Şimdiye kadar böyle bir uzayaracı daha üretilmedi, ancak pek çok farklı tasarım üzerinde durulmuştur. Yıldızlarası arası uzaklık çok muazzam derecede büyük olduğundan, uzayaracının hedefine makul bir süre zarfında varabilmesi için çok yüksek hızlara çıkarılması gerekmektedir. Fırlatılış sırasında bu kadar yüksek hızlara erişip hedefe varışta bu hızdan kurtulmak için gerekli tasarımı oluşturabilmek, uzayaracı tasarımcıları için zorlayıcı bir çalışma olacaktır.[8]
Etkililik
Uzayda, itki sisteminin amacı bir uzay aracının hızını (v) değiştirmektir. Bu daha büyük uzay araçları için daha zor olduğundan, tasarımcılar genelde momentumu (mv, külte*hız) tartışırlar. Momentum'daki değişiklik miktarına itme (İng:impulse) denir.[9] Bu yüzden, uzaydaki bir itki (İng:propulsion) sisteminin amacı itme (İng:impulse) oluşturmaktır.
Bir uzayaracı Dünya'dan fırlatılırken; bir itki sistemi, net bir ivmelenme sağlamak üzere, yerçekimi sürüklemesini (İng:gravitational pull) aşmalıdır[10]. Yörüngede, fazladan herhangi bir ivmelenme miktarı, çok küçük olsa bile, yörüngenin yolunun değişmesine ve sonuç olarak aracın yörüngesinin değişmesine yol açacaktır.
Hızın değişim miktarına ivme denir ve momentum'un değişim miktarı ise kuvvet olarak adlandırılır. Hedeflenen bir hıza ulaşmak için, küçük miktardaki bir ivme uzun bir zaman aralığında uygulanabilir ya da büyük miktardaki bir ivme kısa bir zaman aralığında uygulanabilir. Benzer bir şekilde hedeflenen ivmeye ulaşmak için büyük miktardaki bir kuvvet kısa bir zaman aralığında uygulanabilir ya da küçük miktardaki bir kuvvet uzun bir zaman aralığında uygulanabilir. Bu da demek oluyor ki uzayda yer-yön değişimi sırasında, küçük miktarda ivme oluşturan ancak uzun süre çalışan bir itki yöntemi, büyük miktarda ivme üreten ve kısa süre çalışan bir itki yöntemi ile, toplamda, aynı itmeyi üretir. Ancak bir gezegenin yüzeyinden fırlatma yapılırken, küçük ivmeler gezegenin yerçekimi sürüklemesini aşamazlar ve dolayısıyla bu amaçla kullanılamazlar.
Dünyanın yüzeyi, bir yerçekimi kuyusunun oldukça derininde yer almaktadır. Dünya yüzeyindeyken bu alandan çıkabilmek gereken kurtulma hızı 11.2 kilometre/saniye değerindedir. İnsan oğlu, 1g (9.8 m/s²)'lik bir yerçekimsel alanda evrildiği için ideal bir itki sistemi, sürekli olarak 1g değerinde ivmelenme sağlayan bir sistem olacaktır (ancak insan vücudu kısa sürelerle çok daha büyük ivmelenmelere dayanabilmektedir). Böyle bir itki sistemine sahip olan bir uzay gemisindeki kişiler, serbest düşme'nin bulantı, kasların zayıflaması, tat yitimi ve kalsiyumun kemiklerden kaybedilmesi (İng: leaching) gibi kötü etkilerine maruz kalmazlar.
Momentumun korunumu yasasına göre, bir itki yönteminin uzayaracının momentumunu değiştirebilmesi için başka bir nesnenin de momentumunu değiştirmesi gerekmektedir. Birkaç tasarım manyetik alan ya da ışık baskısı (İng:light pressure) gibi şeylerden yararlanarak uzayaracının momentumunu değiştirir, ancak boş uzaydayken roketin kenidisini ileriye itebilmesi için yanında, atabileceği ya da itki sisteminde kullanabileceği, belirli bir miktar kütle getirmesi gerekmektedir. Bu kütleye tepki kütlesi (İng: reaction mass) denir.
Bir roketin çalışabilmesi için iki şeye ihtiyaç vardır: tepki kütlesi ve enerji. "m" miktarındaki tepki kütlesinin parçacığının "v" hızında fırlatılmasıyla elde edilen itkinin değeri "mv" kadardır. Ancak bu parçacığın fırlatıldıktan sonra mv²/2 değerinde kinetik enerjisi olacaktır, dolayısıyla bu enerji bir yerden gelmelidir. Tipik bir katı, sıvı ya da hibrit (İng: hybrid rocket) rokette, yakıt yakılırak enerji elde edilir ve tepkime sonucu üretilen maddelerin tepki kütlesi olarak arka taraftan akıp çıkmaları sağlanır. Bir iyon iticisinde (İng: ion thruster), iyonları arkadan çıkacak şekilde ivmelendirmek için elektrik kullanılır. Burada başka bir kaynaktan elektrik enerjisinin elde edilmesi gerekir (örneğin güneş paneli ya da nükleer reaktör). İyonlar ise tepki kütlesini teşkil ederler.[10]
Bir itki sisteminin verimini tartışırken, sistemin tasarımcıları sıklıkla tepki kültesinin verimli kullanılması üzerinde yoğunlaşırlar. Tepki kütlesi roket ile birlikte taşınmalı ve kullanldığında geri dönemez şekilde tüketilmelidir. Belirli bir miktar tepki kütlesinden ne kadar itme üretildiğini anlamanın bir yolu özgül itici kuvvettir. Bu değer dünyadaki-ağırlık birimi başına itme değerine denk gelir (genellikle olarak gösterilir). Bu değerin birimi saniyedir. Çünkü uzaydaki araçlar hakkında tartışırken tepki kültesinin Dünyadaki ağırlığı önemsizdir, özgül itici kuvvet ayrıca birim kütle başına itme miktarı olarak da değerlendirilir. Özgül itici kuvvetin bu alternatif biçimi hız ile aynı birimi (m/s) kullanır ve gerçekte motorun [kullanılmış yakıtının motordan] etkin çıkış hızına eşittir (genellikle olarak gösterilir). Karışıklığa neden olacak şekilde, her iki değer de bazen özgül itici kuvvet olarak adlandırılır. İki değer arasında gn (İng: standard gravity) kat kadar fark vardır ve standart yerçekimi yüzünden oluşan ivmelenme olan 9.80665 m/s² () değerine denk gelir.



Yüksek bir "motordan-gaz-çıkış hızı"na sahip olan bir roket aynı itme değerine daha az tepki kütlesiyle erişebilir. Ancak itme için gerekli olan enerji motordan-gaz-çıkış hızı ile doğru orantılıdır, dolayısıyla kütleyi daha verimli işleyen motorların daha çok enerjiye ihtyacı vardır ve genellikle enerjiyi daha az verimli kullanırlar. Eğer motorun çok büyük miktarda itki üretmesi gerekiyorsa bu durum bir problem teşkil edecektir. Saniye başına büyük miktarda itme üretebilmek için, saniye başına büyük miktarda enerji kullanılmalıdır. Böylece kütleyi yüksek verimlilikle işleyebilen motorlar yüksek miktarlarda itki üretmek için saniye başına muazzam miktarlarda enerjiye ihtiyaç duyacaklardır. Sonuç olarak kütleyi yüksek verimlilikle işleyebilen motor tasarımlarının çoğu da, yüksek miktarlarda enerjinin bulunamaması sebebiyle, düşük miktarda itki sağlarlar.
Yöntemler
İtki yöntemleri, tepki kütlesini ivmelendirme yöntemlerine göre sınıflandırılabilirler. Ayrıca fırlatmalar, gezegene varışlar ve inişler için özel yöntemler de bulunmaktadır.
Tepki motorları
Bir tepki motoru (İng: reaction engine), Newton'un üçüncü yasası gereğince [uzay aracından] tepki kütlesi (İng: reaction mass) atarak itki sağlayan bir motordur. Bu hareket yasası genel olarak en çok şu şekilde ifade edilir: "Her hareket kuvveti için, eşit ama karşıt bir tepki kuvveti vardır".
Örnekler arasında kanallı jet motorları (İng: duct engine) ile roket motorları ve ayrıca çok yaygın olmayan çeşitlerden olan Hall etkisi iticileri (İng:Hall effect thruster), iyon iticileri (İng: Ion thruster) ve kütle sürücüleri (İng:mass driver) bulunmaktadır. Hava soluyan kanallı jet motorları açıktır ki hava olmaması sebebiyle uzayda itki için kullanılmazlar; ancak tasarlanan bazı uzay araçları gezegenden kalkışa ve gezegene inişe yardımcı olması amacıyla bu çeşit motorlara da sahiptir.
Delta-v değeri ve yakıt
Boş uzayda düz bir çizgide, uzay aracının kullanılabilir yakıtının tamanının harcanması araca net bir hız değişimi kazandırır; bu değer 'delta-v' () olarak gösterilir.

Gazın çıkış (egzoz) hızı sabitse o zaman bir aracın toplam değeri, roket denkleminden hesaplanabilir; burada M yakıtın kütlesi iken P uçuş yükünün kütlesini (buna roketin fiziksel yapısının kütlesi de dahildir), ise etkin gaz çıkış hızını (İng: velocity of the rocket exhaust) gösterir. Takip eden denklem Tsiolkovsky roket denklemi (İng: Tsiolkovsky rocket equation) olarak bilinir:

Yukarıda bahsedildiği üzere, tarihsel sebeplerden ötürü değeri bazen aşağıdaki şekilde yazılır:

burada , roketin özgül itici kuvvetidir, saniye olarak ölçülür ve ise deniz seviyesindeki yerçekimsel ivmelenme değeridir.

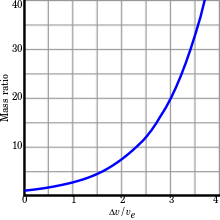
Yüksek delta-v değerli bir görev sırasında, uzay aracının kütlesinin büyük çoğunluğunun tepki kütlesinden oluşması gerekir. Bir roket tepki kütlesinin tamamını taşımak zorunda olduğun için, başlangıçta harcanan/tüketilen tepki kütlesinin çoğu görev-yükü yerine tepki kütlesini ivmelendirmeye yarar. Eğer roketin görev-yükünün P kütlesi varsa, o zaman hızını kadar değiştirmesi gerekmektedir ve eğer roket motorunun gaz çıkış (egzoz) hızı ve ise o halde tepki kütlesinin ihtiyaç duyulan M kütlesi roket denklemi kullanılarak hesaplanabilir ve için formül ise aşağıdaki gibidir:

ve değerinden daha küçük olan değerleri için, bu denklem genel olarak doğrusaldır (İng: Linearity) ve küçük miktarda tepki kütlesine ihtiyaç duyulur. Eğer değeri ve değerine çok yakınsa, o takdirde görev-yükü ile roketin fiziksel altyapısının (motorlar, yakıt tankları vb.) ağırlıkları toplamının en az iki katı kadar yakıt gerekecektir. Bunun ötesinde ise büyümenin biçimi üsteldir; gaz çıkış (egzoz) hızından çok daha yüksek hızlar, yakıtın görev-yükü ve altyapı kütlesine göre çok yüksek oranlarda olmasını gerektirir.
Örneğin bir gezegene inen ya da gezegenden kalkış yapan bir görev için, kütle çekiminin ve atmosferik sürtünmenin etkilerinin üstesinden yakıt yardımıyla gelinmesi gerekmektedir. Bu gibi etkiler ile başka etkileri birleştirerek, göreve ait bir etkin delta-v değeri elde etmek sıklıkla uygulanan bir yöntemdir. Örneğin alçak Dünya yörüngesindeki bir görev, 9.3–10 km/s değerinde bir delta-v gerektirir. Bu görev delta-v değerleri, genellikle bir bilgisayar üzerinde bütünleştirilirler.
Oberth etkisi (İng: Oberth effect) gibi bazı etkiler ise sadece roketler ya da yüksek değerde g kuvveti üreten motorlar gibi, yüksek oranda itki sağlayabilen motorlar tarafından yüksek verimle kullanılabilir.
Güç tüketimi ve itki verimi
Roketler ve iyon iticileri gibi tüm tepki motorları (İng: reaction engine) için bir miktar enerji, tepki kütlesinin ivmelendirilmesine harcanır. Her motor bir miktar enerjiyi de boşa harcar, ancak %100 verim olduğu farzedilse bile, çıkış maddesini/gazını ivmelendirmek için motorun aşağıdaki gibi ifade edilen miktarda enerjiye ihtiyacı olacaktır:

Bu enerjinin tamamı kaybolmaz- bir kısmı aracın kinetik enerjisinin bir parçası olur, kalanı ise çıkış maddesinin/gazının artık hareketi ile harcanır.
Aracın son halinde araçta ne kadar enerji biriktiğini gösteren roket denklemi ile toplamda ne kadar enerji gerektiğini gösteren yukarıdaki denklem karşılaştırıldığında, %100 motor verimi sağlandığı durumda bile, araca sağlanan enerjinin tamamı kesinlikle araçta birikmez/kalmaz - bir kısmı, genellikle de çoğunluğu, çıkış maddesinin/gazının kinetik enerjisi olarak harcanır.
Tam miktar aracın tasarımına ve göreve göre değişir. Ancak bazı sabit değerler bulunmaktadır:
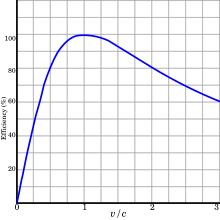
- Eğer, örneğin bir görevin delta-v değeri için, sabitse; roket tarafından kullanılan enerjiyi en aza indiren belirli bir değeri vardır. Bu görevin delta-v değerinin ⅔ kadarına denk gelen bir çıkış maddesi/gazı hızına çıkmaktadır (bkz. roket denkleminden hesaplanan enerji). Yüksek ve sabit özgül itici kuvvet değerine sahip olan sürücülerin/itki sistemlerinin (örn: iyon iticileri), bundan muazzam derecede daha büyük olan çıkış maddesi/gazı hızları bulunmaktadır ve pek çok görev için idealdirler.
- Eğer çıkış maddesi/gazı hızı değiştirilebilir/ayarlanabilir yapılabilirse ve herhangi bir anda aracın hızına eşit ve ters yönde olacak şekilde ayarlanırsa, o durumda salt en az enerji kullanımı elde edilir. Bu elde edildiğinde, uzayda madde/gaz çıkış durur [1] ve hiç kinetik enerji kalmaz. Bu durumda itkisel verim ise %100 olur- enerjinin tamamı araçta kalır (teoride, böyle sürücüler %100 verimli olurlardı, ancak pratikte sürüş sistemi içinde ısı kaybı olurdu ve çıkış maddesinde/gazında artık ısı kalırdı). Ama bu pek çok durumda kullanışsız miktarlarda yakıt kullanımına neden olur, ancak teoride dikkate değer bir husustur. Her hâlükârda, bu yöntemin uygulanabilmesi için aracın hareket ediyor olması gerekmektedir.
VASIMR (İng: VASIMR) veya Elektrotsuz plazma iticisi (İng:Electrodeless plasma thruster) gibi bazı sürücüler/motorlar, madde/gaz çıkışı hızlarını gerçekten de önemli ölçüde değiştirebilmektedirler. Bu özellik yakıt kullanımı azaltmaya yardımcı olur ya da uçuşun çeşitli aşamalarında ivmelenmeyi iyileştirir. Ancak enerji olarak en iyi verim ve ivmelenme, her zaman madde/gaz çıkış hızının aracın hızına yakın olduğu durumlarda elde edilir. Önerilen iyon ve plazma sürücülerinin genellikle madde/gaz çıkış hızları idealden muazzam ölçüde daha fazladır. Örneğin VASIMR sürücüsünde bildirilen en düşük hız 15 bin m/s civarındadır buna karşın yüksek Dünya yörüngesinden Mars'a gidecek olan bir görevin delta-v değeri 4 bin m/s civarındadır (bkz. Delta-v eşikleri İng: Delta-v budget).
Enerji üretim sığası artışının iyi olacağı düşünülebilir ve bu gerçekten de başlangıçta verimi artırabilir, ancak bu şekilde kaçınılmaz olarak güç kaynağının da kütlesinin artışına sebep olunur ve sonuçta güç kaynağı ile ilişkili motorların ve yakıtın toplam kütlesi aracın ağırlığının büyük çoğunluğunu oluşturmaya başlar. Bu noktadan sonra daha fazla güç ekleme, verim üzerinde kayda değer bir iyileştirme yaratmaz.
Güneş enerjisi ve nükleer enerji, şimdilik, fiilen sınırsız "enerji" kaynakları olmalarına rağmen, sağlayabilecekleri en yüksek güç miktarı aslında güç kaynağının kütlesiyle doğru orantılıdır (örn. özgül güç-specific power, güç kaynağı teknolojisine bağlı olarak genellikle sabit bir değer almaktadır). Yakıt kütlesinden kazanç amacıyla büyük bir değerine sahip olan herhangi bir özgül güç için, en yüksek ivmelenme değerinin değeri ile ters orantılı olduğu ortaya çıkmaktadır. Dolayısıyla hedeflenen bir delta-v değerine ulaşmak için gereken süre değeri ile doğru orantılıdır. Bu yüzden değeri çok büyük olmamalıdır.
Enerji

İdeal bir durumda, değeri faydalı yükü ve farkı ise tepki kütlesini gösterir (bu, boş yakıt tanklarının kütlesiz olmasına denk gelir). Gereken enerji basitçe aşağıdaki gibi hesaplanır



Bu değer dışarı atılmış tepki kütlesinin, çıkış maddesi/gazı hızına denk bir hızdayken sahip olduğu kinetik enerjiye karşılık gelmektedir. Eğer tepki kütlesinin hızı sıfırdan çıkış maddesi/gazı hızına çıkarılırsa, o halde üretilen tüm enerji tepki kütlesine aktarılır, geriye rokete ve görev yüküne kinetik enerji kazanımı sağlayacak bir şey kalmaz. Ancak roket hareket halindeyken ivmelenirse (yani tepki kütlesi roketin gittiği yönün tersi yönüne doğru atılırsa/fırlatılırsa), bu durumda tepki kütlesine daha az kinetik enerji aktarılır. Örneğin, =10 km/s ve roketin hızı 3 km/s ise, o halde küçük miktardaki harcanmış tepki kütlesinin hızı, ileri doğru 3 km/s'den geriye doğru 7 km/s olacak şekilde değişir. bu durumda, normalde 1 kg tepki kütlesi başına gerekli olan enerji 50 MJ olmasına rağmen, bu örnekte tepki kütlesinin hızındaki değişim için sadece 20 MJ kullanılmıştır. Diğer yandan kalan 30 MJ ise roketin ve görev yükünün kinetik enerjisinin artışında kullanılmıştır.
Genel olarak:

Böylece herhangi küçük bir zaman aralığında rokette meydana gelen belirgin bir enerji kazanımı, kalan yakıtla birlikte, toplam kütle bölünen, enerji kazanımıdır. Burada enerji kazanımı; yakıt tarafından üretilen enerji ile tepki kütlesindeki enerji kazanımı arasındaki farka eşittir. Roketin hızı ne kadar büyükse, tepki kütlesinin enerji kazanımı o kadar az olur; Dahası eğer roketin hızı, çıkış maddesi/gazı hızının yarısından fazla ise, tepki kütlesi bu durumda harcanırken/atılırken enerji kaybedecektir. böylece roketin enerji kazanımına katkı sağlayacak şekilde; roketin hızı ne kadar fazlaysa, tepki kütlesinin de enerji kaybı o kadar fazla olacaktır.

Yukarıdaki formülde bulunan simgesi, roketin (potansiye artı kinetik enerji olarak) özgül enerjisini gösterirken, simgesi ise, sadece değerindeki değişim olmayıp ayrı bir değişkendir. Roketi yavaşlatılması durumunda, yani tepki kütlesinin hız ile aynı yönde atılması durumunda, değeri eksi olarak alınmalıdır.


Bu formül de benzer şekilde (ısı olarak enerji kaybının olmadığı) ideal bir durum içindir, İkincisi itkide azalmaya yol açar, dolayısıyla amaç enerji kaybetmek olduğunda bile bir dezavantaj oluşmaktadır (yavaşlama).
Kimyasal tepkimeli bir rokette olduğu üzere, enerji kütlenin kendisi tarafından üretiliyorsa, yakıt değeri olmalıdır, burada yakıt değeri için oksitleyicinin de kütlesi hesaba katılmıştır. değeri genel olarak 4.5 km/s civarındadır, bu da 10.1 MJ/kg'lık bir yakıt değerine denk gelmektedir. Gerçek yakıt değeri bundan daha daha fazladır ancak enerjinin büyük bir kısmı çıkış maddesi/gazı içerisindeki atık ısı olarak kaybedilir.


Gerekli enerji olan değeri


olarak ifade edilir.
Buradan varılan sonuçlar aşağıdaki gibidir:
- olması durumunda, şu denklem elde edilir:
- Verilen bir değeri için, eğer ise en düşük düzeyde enerji gerekecektir. Bu durumda



- şeklinde ifade edilen enerji gerekecektir.
- Hızın sıfır iken sabit yönde ve diğer kuvvetlerin yokluğunda gerçekleştirilen ivmelenme durumunda, yukarıda hesaplanan enerji görev-yükünün son kinetik enerjisinin %54.4'ünden fazlasına denk gelmektedir. Bu en iyi (optimal) koşullarda gerçekleşen durumdayken başlangıç kütlesi, son kütlenin 4.92 katına denk gelmektedir.

Bu sonuçlar sabit bir çıkış maddesi/gazı hızı içindir.
Oberth etkisi (İng: Oberth effect) ve sıfır olmayan bir hızdan başlanması nedeniyle, yakıttan ihtiyaç duyulan potansiyel enerji, aractaki ve görev-yükündeki enerji artışından daha az olabilir. Bu tepki kütlesinin atıldıktan sonra önceye göre daha az hıza sahip olduğu durum olabilir– roketler yakıtın kinetik enerjisinin bir kısmını ya da tamamını serbest bırakabilirler.
Ayrıca, bir yörüngeden diğerine gitmek gibi bir amaç için, gerekli değeri, motorun üretebilme hızına büyük oranda bağımlı olabilir ve üretim hızı çok düşükse manevra yapmak mümkün hale gelebilir. Örneğin, Alçak Dünya Yörüngesi'ni (İng:LEO) hedefleyen bir fırlatma, 9.5 km/s civarında bir değerini gerektirir, ancak motor g'den biraz fazla miktarda olacak şekilde üretebilirse, çok büyük bir gerektiren yavaş bir fırlatma olurdu (örneğin yükseklik ya da hız kazanmadan havada aynı yerde kalınması, bu durumda saniyede 9.8 m/s miktarında değeri gerektirecektir). Eğer mümkün olan üretim oranı ya da daha az ise, bu motorlar manevra mümkün olmayacaktır.

Güç için verilen formül aşağıdaki gibidir

Burada itkiyi ve ise itkiden kaynaklanan ivmelenmeyi ifade etmektedir. Buradan, birim güç için teorik olarak mümkün olan itki değerini veren aşağıdaki denklem edilmektedir ( birimi m/s):



Böylece birim güç başına teorik olarak mümkün olan itkinin değeri 2'nin m/s cinsinden özgül itici kuvvete bölünmesiyle edilebilmektedir. 'itki verimi, bunun yüzde cinsinden hali olarak gerçek itkiye denk gelmektedir.
Eğer güneş elektrik gücü (İng:solar power) kullanılırsa, bu durum değerini kısıtlayacaktır; ayrıca büyük bir değerinin olduğu durumda muhtemel ivmelenme bu değer ile ters orantılıdır, dolayısıyla gerekli bir delta-v hızına ulaşmak için gereken süre değeri ile doğru orantılıdır; %100 verim varsayımı ile:
- koşulu sağlandığı müddetçe, istenen süreye eşitliğiyle ulaşılacaktır.


Örnekler:
- Güç= 1000 W, kütle= 100 kg, = 5 km/s, = 16 km/s, süre= 1.5 ay.
- Güç= 1000 W, kütle= 100 kg, = 5 km/s, = 50 km/s, süre= 5 ay.
Bu yüzden çok büyük bir değer olmamalıdır.
Güç-İtki oranı
Güç-İtki oranı basitçe şu şekilde ifade edilebilir:[11] Bu yüzden verilen herhangi bir araç gücü olan P için, sağlanabilecek olan itki şu şekildedir:


Örnek
Mars'a gönderildiği varsayılan 10 bin kg ağırlığındaki uzay sondası için, ADY'den (LEO) hohmann aktarma yörüngesi kullanılarak, yola çıkılırken, gerekli yaklaşık olarak 3000 m/s değerinde olacaktır. Bu örnek için aşağıdaki iticilerin kullanılabildiğini varsayılmaktadır:
| Motor | Etkin Çıkış maddesi/gazı Hızı (km/s) | Özgül itici kuvvet (s) | Yakıt kütlesi (kg) | Gereken Enerji (GJ) | Birim Yakıt (kg) başına Enerji | En düşük güç/itki | Güç üreten kütle/itki* |
|---|---|---|---|---|---|---|---|
| Katı yakıtlı roket | 1 | 100 | 190,000 | 95 | 500 kJ | 0.5 kW/N | N/A |
| Sıvı yakıtlı roket | 5 | 500 | 8,200 | 103 | 12.6 MJ | 2.5 kW/N | N/A |
| İyon iticisi (Ion thruster) | 50 | 5,000 | 620 | 775 | 1.25 GJ | 25 kW/N | 25 kg/N |
* - 1kW/kg değerinde bir özgül güç olduğu varsayılıyor
Yukarıdaki tabloda yakıtı daha verimli kullanan motorların çok daha az yakıt tükettiğine dikkat ediniz; bazı motorlar için yakıtın ağırlığı (görev-yükünün ve motorun ağırlıklarına göre) göz ardı edilebilecek kadar küçüktür. Ancak, bu verimli motorlar büyük miktarlarda toplam enerjiye ihtiyaç duyacaktır. Dünya'dan fırlatmalar için, motorların 1'den büyük bir itki-ağırlık oranına sahip olması gerekmektedir. Bunu iyon iticileri ile ya da daha çok teorik olan elektriksel iticiler ile yapabilmek için, motorun birkaç gigawatt (milyar watt) değerinde — büyük bir şehrin elektrik üretimine denk olan - bir güç ile beslenmesi gerekmektedir. Yukarıdaki tablodan görülebileceği üzere, şu anki güç kaynaklarıyla bu yöntemin dünyadan kalkışlar için kullanılması uygulamada mümkün değildir. Alternatif yaklaşımlar arasında, hızlanmak için gerekli enerjinin tepki kütlesi (İng: reaction mass) tarafından sağlanmadığı lazer itki'nin (ing: laser propulsion) bazı çeşitleri bulunmaktadır. bu yöntemlerde enerji aracın dışındaki bir lazerden ya da başka bir Işınla-güç-sağlanan itki sistemi (İng: Beam-powered propulsion) tarafından sağlanmaktadır. Bu tasarımların küçük örnekleri uçuruldu, ancak mühendislik sorunları çok karmaşık ve yeryüzündeki sabit güç sistemleri hala çözülmemiş bir sorun olarak durmaktadır.
Bunun yerine, daha küçük, daha az güçlü bir üreteç ile gereken toplam enerji daha uzun sürede üretilebilir. Bu küçük güç, saniyede çok küçük miktardaki yakıtı ivmelendirmeye ancak yeterli olmaktadır ve Dünya yüzeyinden fırlatma için de yeterli olamamaktadır. Ancak,sürtünmenin olmadığı yörüngelerdeki uzun süreler boyunca, istenen hıza sonunda erişilebilmektedir. Örneğin, SMART-1 (İng: SMART-1) uydusunun bu şekilde Ay'a varması bir yıldan fazla sürmüştür, diğer yandan aynı mesafeyi kimyasal roketlerle katetmek birkaç gün sürmektedir. İyon iticisinin daha az yakıta ihtiyaç duyması sebebiyle, toplam fırlatma kütlesi genellikle daha az olmaktadır ve bu da genellikle toplam maliyetin daha düşük olmasını sağlar ancak yolculuk daha uzun sürmektedir.
Görev planlama bu yüzden sıklıkla, projenin toplam maliyetinin en aza indirilmesi amacıyla, itki sisteminin seçilmesini ve durum ile koşullara uydurulması için gerekli ayarlamaların yapılmasını içerir; fırlatma maliyetlerinden ve görev süresinden, bu iş için gereken yakıt oranına göre feragat etmeyi de içerebilir.
Roket motorları

Roket motorlarının çoğu, içten yanmalı Isı motoru sınıfında iken aralarında yanmayla işlemeyen biçimleri de vardır. Roket motorları genellikle, yüksek sıcaklıkta, sıcak gaz şeklinde, tepki kütleleri üretirler. Bu sonuç katı,sıvı ya da gaz şeklindeki yakıtın, yanma bölmesinde bir oksitleyici ile yakılması ile elde edilmektedir. Elde edilen aşırı sıcak olan gaz, yüksek-genişleme oranına sahip olan bir çıkış bölmesi (İng:nozzle) aracılığıyla araçtan atılır. Bu çan şeklindeki çıkış bölmesi, bir roket motoruna özgün şekli veren kısımdır. Bu bölmenin amacı, ısı enerjisinin çoğunu hareket enerjisine dönüştürerek, tepki kütlesini büyük ölçüde hızlandırmaktır. Çıkış gazı hızının deniz seviyesinde ses hızının 10 katına kadar ulaşması alışılagelmiş bir durumdur.
Roket motorları uzay aracı itki sistemi için kullanılan motorlar arasında, esasen en yüksek özgül güç (İng: specific power) ve yüksek özgül itki (İng: specific thrust) değerlerini veren motorlardır.
İyon itkili roketler ise plazmayı ya da (+/-) yüklü gazı, bir manyetik ayna (İng: Magnetic mirror) içerisinde ısıtarak manyetik bir çıkış bölmesinden (İng: magnetic nozzle) araç dışına atmak suretiyle itki oluşturduklarından; plazma, hiçbir katı madde ile doğrudan temas etmek zorunda kalmaz. Doğal olarak bu işlemleri gerçekleştirecek olan düzenek karmaşık bir yapıya sahiptir, ancak nükleer füzyon üzerine yapılan araştırmalar sonucunda oluşan bazı yöntemlerin itki sistemlerinde kullanılması önerilmiştir. Bu yöntemlerden bazıları ise laboratuvar ortamında test edilmiştir.
Kimyasal, elektriksel ve benzeri ısıtma yöntemleri kullanan çeşitli motorların listesi için roket motoru sayfasını inceleyiniz.
Elektromanyetik itki

(İng:Electrically powered spacecraft propulsion)
Tepki kütlesini yüksek hızlara çıkarmak için yüksek sıcaklık ve Akışkanlar dinamiği ilkelerini kullanılmasının dışında, tepki kütlesini doğrudan hızlandırmak için elektrostatik ya da elektromanyetik kuvvetleri kullanan çeşitli yöntemler bulunmaktadır. Genellikle tepki kütlesi iyonlardan oluşan bir akımdır. Bu tür bir motor genellikle elektrik gücünü önce atomları iyonize etmek için, ardından da iyonları yüksek hızlara ivmelendirmek üzere bir voltaj/gerilim gradyanı oluşturmak için kullanır.
Elektrikli itki fikri, Robert Goddard'ın bu olasılık üzerinde düşünüp kişisel defterine konuyla ilgili not düştüğü, 1906 tarihine kadar geriye gider.[12] Fikri ilk olarak Konstantin Tsiolkovsky 1911 yılında yayımlamıştır.
Bu motorlar için, en yüksek çıkış gazı/maddesi hızlarında, enerji verimi ve itki miktarı çıkış gazı hızıyla ters orantılıdır. Bu motorların çok yüksek seviyelerde çıkış gazı hızları üretebilmeleri, muazzam miktarlarda enerjiye gereksinimleri olduğu anlamına gelir ve bu yüzden günümüzde kullanımdaki güç kaynakları ile düşük itki elde edilebilirken buna karşın çok az miktarda yakıt kullanılmaktadır.
Güneşe makul ölçüde yakın olan bazı görevler için, güneş enerjisi yeterli gelebilir ve sıklıkla da kullanılmıştır, ancak daha uzakta olan ya da daha yüksek güç gerektiren bazı görevlerde, nükleer enerji zorunludur; Kullandıkları gücü nükleer bir kaynaktan [sistemden] çeken motorlara nükleer elektrikli roket (İng: nuclear electric rocket) denir.
Günümüzde kullanılan herhangi bir elektrik güç kaynağı (kimyasal, nükleer veya güneş enerjisi) ile üretilebilen en yüksek güç miktarı, üretilebilen itki miktarını küçük bir değerle sınırlar. Güç üretimi uzay aracına önemli ölçüde kütle eklemektedir ve güç kaynağının ağırlığı, aracın verimini kaçınılmaz bir şekilde sınırlamaktadır.
Günümüzde kullanılan nükleer güç üreteçleri, iç gezegenlerin yakınlarında güneşten sağlanan enerji bağlamında, watt başına gereken güneş panellerinin toplam ağırlığının yaklaşık olarak yarısına denk gelmektedir. Kimyasal güç üreteçleri, elde edilebilen toplam enerjinin çok daha küçük olması sebebiyle kullanılmamaktadırlar. Uzay aracına ışınla gönderilen elektrik gücü sistemleri umut vadetmektedir.

Bazı elektromanyetik yöntemler aşağıda verilmiştir:
- İyon iticisi (İng: Ion thrusters; önce iyonlar ivmelendirilir ve daha sonra iyon ışını/akımı, "nötrleştirici" (neutralizer) adı verilen bir katottan yayımlanan bir elektron akımıyla nötrleştirilir/yüksüzleştirilir)
- Elektrostatik iyon iticisi (İng: Electrostatic ion thruster
- Alan-yayımlı elektrikli itki (İng: Field-emission electric propulsion)
- Hall etkisi iticisi (İng: Hall effect thruster)
- koloit iticisi (İng: Colloid thruster)
- Elektroısıl (elektrotermik/elektrotermal) iticiler (İng:Electrothermal thrusters) (elektromanyetik alanlar aracılığıyla üretilen plazma, yakıtın çoğunluluğunun ısısını artırmak için kullanılır; gaz halindeki yakıta aktarılan ısı enerjisi daha sonra, fiziksel olarak üretilmiş ya da manyetik alandan oluşan bir çıkış bölmesi -nozul, İng: nozzle- aracılığıyla kinetik enerjiye dönüştürülür)
- Arkjet roketi (İng: DC arcjet)
- mikrodalga arkjet (İng: DC arcjet)
- Helikon Çift Katmanlı İticisi (İng: Helicon Double Layer Thruster)
- Elektromanyetik iticiler (iyonlar, Lorentz kuvveti aracılığıyla ya da elektrik alanının ivmelenme yönünde olmadığı elektromanyetik alanların yarattığı etki aracılığıyla ivmelendirilir)
- Manyetoplazmadinamik itici (İng: Magnetoplasmadynamic thruster)
- Elektrotsuz plazma iticisi (İng: Electrodeless plasma thruster)
- Atımlı elektrikleyici itici (İng: Pulsed inductive thruster)
- Atımlı plazma iticisi (İng: Pulsed plasma thruster)
- Değişken özgün itkili manyetoplazma roketi VASIMR (İng: VASIMR)
- Kütle sürücüsü (kütle güdücüsü/kütle iticisi) (İng: Mass driver)
Elektroısıl (elektrotermik/elektrotermal) ve elektromanyetik iticilerde, hem iyonlar hem de elektronlar ivmelendirilir, yüksüzleştiriciye/nötrleştiriciye (İng: neutralizer) gerek olmamaktadır.
İç tepki kütlesiz manevra
(İng: Zero-propellant maneuver)
Momentum'un korunum yasası genellikle, tepki kütlesi kullanmayan herhangi bir motorun uzay gemisinin kütle merkezini ivmelendiremeyeceğini (diğer taraftan konumlamanın/doğrultunun değiştirilebilmesi ise mümkündür) belirtir. Ancak uzay, özellikle de Güneş Sistemi'nin içindeki uzay boş değildir; bu alanda yerçekimi alanları, manyetik alanlar, elektromanyetik dalgalar, güneş rüzgârı ve güneş radyasyonu mevcuttur. Özellike elektromanyetik (EM) dalgaların, kütlesiz olmalarına rağmen, momentuma sahip oldukları bilinmektedir; özellikle EM dalganın "P" ile gösterilen momentum akı yoğunluğu (momentum flux density) nicel olarak, "S" ile gösterilen Poynting vektörünün 1/c katıdır, örn: P = S/c, burada c ışık hızıdır. Alan itki (İng: Field propulsion) yöntemleri tepki kütlesi kullanmadıkları için, aracın yakınlarında bulunan EM dalgası gibi momentuma sahip bir alanla eşleşerek/alanı kullanarak bu durumdan faydalanmaya çalışır. Ancak bu tür olguların/oluşumların çoğu doğada dağınık halde olduğundan, bununla alakalı olan (örn. EM dalgasını yakalayan) itki yapılarının orantılı olarak büyük olması gerekir.
İşlemesi için çok az yakıt kullanan ya da hiç yakıta ihtiyacı olmayan çeşitli uzay itki sistemi bulunmaktadır. Bir kablo itki sistemi (ing: tether propulsion), yüksek gerilme direnci sahip bir kablo yardımıyla uzay aracını yörüngesini, örneğin gezegenin manyetik alanıyla etkileşerek ya da başka bir nesne ile momentum takas ederek, değiştirmektedir.[13] Güneş yelkenleri, elektromanyetik enerjiden kaynaklanan ışınım basıncından faydalanırla, ancak verimli bir şekidle işleyebilmeleri için büyük bir toplama yüzeyine sahip olmaları gerekmektedir. Manyetik yelkenli (ing: magnetic sail), güneş rüzgârındaki yüklü parçaçıkları, bir manyetik alan ile saptırırak uzayaracına momentum kazandırır. Bunun bir çeşidi olan mini-manyetosferik plazma itki sistemi, manyetik alan içerisinde küçük bir plazma bulutu tutarak Güneşten gelen yüklü parçacıkları bu plazma bulutundan saptırır. elektrik yelkeni (ing: E-sail) ise çok ince ve çok hafif tellerde tuttuğu elektrik yükü ile güneş gelen yüklü parçacıkları saptırarak hareketin yönü üzerinde daha çok hakimiyet sağlayabileceği düşünülen bir sistemdir.
Tasarım kanıtı olarak, NanoSail-D Dünya yörüngesine dönen ilk nanouydu olmuştur.[14] Bu tür küçük uydulları gelecekteki yörünge uyduları arasına katma[] planları yapılmaktadır, böylece onlara ihtiyaç kalmaması durumunda yörüngeden çıkarılarak atmosferde yanmaları sağlanabilecektir. Cubesail ADY'de güneş yelkeninin kullanılacağı ve bir güneş yelkeni ile tüm üç eksende de yönelim denetimi/yönetimi yapılacak olan ilk görev olacaktır.[15]
Japanyo da kendi geliştirdiği ve güneş yelkeni ile güç sağlanan IKAROS adlı uzay aracını 2010 Mayıs ayında fırlatmıştır. IKAROS bu yöntemle itki ve yönelim işlevlerinin başarılı bir şekilde yapılabildiğini ispat etmişti ve bugün hala görevine devam etmektedir.
Bir uydu ya da başka bir uzay aracı açısal momentumun korunumu yasasına tabiidir, bu da kütlenin açısal hızında net bir değişim olmasını engeller. Dolayısıyla, bir aracın göreli konumlanmasını (İng: relative orientation) tepki kütlesi harcamaksızın değiştirmek için, aracın başka bir parçası hedeflenenin tersi yönde dönebilir (İng:rotate). Korunumcu olmayan (non-conservative) dış kuvvetler, öncelikle yerçekimi ve atmosfer kaynaklı kuvvetler, günde birkaç dereceye kadar açısal momentuma katkıda bulunabilirler,[16] bu yüzden ikincil sistemler istenmeyen ve zamanla biriken dönüşsel (rotational) enerjiyi dağıtırlar. Bu nedenle, pek çok uzay aracı, uzaydaki konumlanmayı yönetebilmek için tepki tekerleği/tepki çarkı (İng: Reaction wheel) veya kontrol moment jiroskopu (İng: control moment gyroscopes) kullanmaktadır.[17]
Yerçekimsel sapan, bir uzay sondasını tepki kütlesi harmacadan diğer hedeflerine ulaştırabilmektedir. Diğer göksel cisimlerin yerçekimsel enerjilerini kullanarak, uzay aracı kinetik enerji kazanabilir.[18] Ancak, daha da çok enerji, roketlerin kullanılması koşuluyla 'yerçekimsel yardım' (İng: gravity assist) yöntemiyle elde edilebilir.
Gezegenler arası ve atmosfer içi itki sistemleri

Fırlatma-destek düzenekleri
(İng: Space launch)
Yörüngeye çıkmanın maliyetini muazzam miktarlarda azaltma potansiyeli olan fırlatma-destek düzenekleri üzerine pek çok fikir ortaya atılmıştır. Önerilmiş roketsiz uzaya fırlatma destek düzenekleri şunları içermektedir:
- Skyhook (Gök-kancası) (tekrar-kullanılabilir yörünge-altı fırlatma aracı gerektirir, mühendislik açısından kullanımdaki malzemelerle yapılabilmesi mümkün değildir - İng : Skyhook)
- Uzay asansörü (Dünya'nın yüzeyinden yer sabit yörüngeye uzanan kablo, var olan malzemelerle inşa edilemez - İng: Space elevator)
- Fırlatma döngüsü (yaklaşık 80 km uzunluğunda çok hızlı bir çevirme döngüsü -İng: Launch loop)
- Uzay fıskiyesi (tabanından fırlatılan kütlelerden oluşan bir madde akışı sayesinde yerinde duran çok uzun bir yapı - İng: Space fountain)
- Yörüngesel halka (Dünya'nın etrafındaki bir halkadan aşağı sarkan çubuklardan oluşan bir yapı; Bir uzay asansörü çeşidi - İng:Orbital ring)
- elektromanyetik mancınık (Elektromanyetik top, Gauss silahı) (bir çeşit elektrik silahı - İng:mass driver)
- Rocket kızak fırlatılışı (İng: Rocket sled launch)
- Uzay silahı (HARP projesi-Project HARP, ram ivmelendiricisi-ram accelerator) (kimyasal olarak güç verilen bir silah- İng: Space gun)
- Işınla-güç-sağlanan itkili (İng: Beam-powered propulsion roketlere ve jetlere yerden gönderilen ışın sayesinde güç sağlanır.
- Yüksek irtifa platform istasyonu (İng: High-altitude platform), ilk aşamaya destek vermek üzere tasarlanmıştır.
Hava-beslemeli motorlar
(İng: Airbreathing jet engine)
Yapılan çalışmalar, yaygın olarak kullanılan ramjet ya da turbojet gibi hava-beslemeli motorların, fırlatma araçlarına takıldıklarında kayda değer bir verim artışı sağlayabilmeleri için aşırı ağır olduklarını (çok düşük bir ağırlık/itki oranına sahip olduklarını) göstermiştir. Ancak fırlatma araçları, hava-beslemeli itki sistemleri kullanan taşıma araçlarından yüksek irtifada fırlatılabilirler (İng: air launch) (örn. B-29, Pegasus roket ve White Knight). Fırlatma rayına takılmış olan Jet motorları da kullanılabilir.
Diğer taraftan, yükseliş sırasında hava içinde hareket ediliyor olmasının avantajını kullanacak olan, çok hafif veya çok yüksek hızlı motorlardan önerilenler şunlardır :
- SABRE - hidrojen yakıtlı ve ön-soğutuculu hafif bir turbojet[19]
- ATREX - hidrojen yakıtlı ve ön-soğutuculu hafif bir turbojet[20]
- Sıvı hava döngülü motor (İng:LACE)- roket motoru içinde yakmadan önce havayı sıvılaştıran, hidrojen yakıtlı jet motoru
- Scramjet - "süpersonik yanma" yöntemini kullanan bir jet motoru türü
Normal roket fırlatma araçları, birkaç 10 kilometrelik irtifada açısını değiştirerek yanlamasına hedef yörüngesine doğru ateşleme yapmadan önce neredeyse tamamen dikey bir şekil uçuşu gerçekleştirir; bu başlangıçtaki dikey tırmanış fazladan yakıt harcatır ancak hava sürtünmesini büyük ölçüde azalttığı için yerinde bir manevradır. Hava-beslemeli motorlar yakıtı çok daha verimli bir şekilde yakarlar ve bu da çok daha düz bir fırlatma doğrultusunu olanaklı kılacağından araçlar Dünya'nın yüzeyine yaklaşık olarak teğet olan bir doğrultuda atmosferi terkedene kadar uçacaklar ve hedef yörüngesel hıza ulaşmak için gereken delta-v hızına ulaşmak için ayrıca ateşleme gerçekleştireceklerdir.
Gezegene varış ve iniş

Bir araç hedef gezegenin çevresinde yörüngeye gireceği zaman ve gezgene ineceği zaman, hızını ayarlarmak zorundadır. Bu işlem aşağıda sayılan tüm yöntemlerle (yeteri kadar yüksek itki üretebildikleri sürece) yapılabilmektedir, ancak gezegenlerin atmosferlerinin ve/veya yüzeylerinin avantajını kullanabilecek birkaç adet yöntem bulunmaktadır.
- Atmosferle frenleme (ing: Aerobraking) yöntemi, yörüngenin en düşük noktasındayken (periapsis), bir gezegenin atmosferinin üst katmanlarından yinelenen geçişler yaparak hız kesmek suretiyle uzay aracının eliptik yörüngesinin en yüksek noktasının (apoapsis) mesafesinin azaltılmasına olanak sağlar. Bu yöntemle, eliptik yörüngeye girmek düşük bir dairesel yörüngeye göre çok daha az delta-V gerektiği için, önemli ölçüde yakıt tasarrufu yapılabilmektedir. Frenleme pek çok yörünge dönüşü süresince yapıldığından, ısınma göreli olarak azdır ve ısı kalkanı gerektirmemektedir. Bu yöntem, Mars Global Surveyor, Mars Odyssey ve Mars Reconnaissance Orbiter gibi birçok MARS görevi sırasında ve en azından bir adet Venüs görevinde (Magellan - ing: Magellan).
- Atmosfere yakalanma (İng: Aerocapture) çok daha agresif bir manevradır ve gezegene varan hiperbolik bir yörüngeyi tek geçişte eliptik bir yörüngeye çevirmek için kullanılır. Bu yöntem; atmosferin içerisinden tek bir seferde geçilerek tamamlanmak zorunda olması ve, "Atmosferle frenleme" (Aerobraking) yönteminin aksine, atmosferin önceden gözlemlenmesi olasılığının olmaması sebebiyle, ısı kalkanı ve çok daha hassas bir yolbul (ing:navigasyon) sistemi gerektirir. Eğer amaç yörüngede kalmaksa, bu yöntemin sonunda en azından bir adet daha itkisel manevra yapılması gerekmektedir—aksi takdirde elde edilen yörüngenin en düşük noktası atmosfer içerisinde kalacaktır ve en sonunda atmosfere tekrar girişe ve gezegene inişe yol açacaktır. "Atmosfere yakalanma" yöntemi şimdiye kadar hiçbir (dış) gezegen görevinde kullanılmamıştır, ancak Ay'dan dönen Zond 6 ve Zond 7 araçları tarafından gerçekleştirilen Kaydırmalı tekrar-giriş (ing: re-entry skip) manevraları "Atmosfere yakalanma" manevralarıydı çünkü hiperbolik yörüngelerini atmosferin içerisine girerek eliptik yörüngeye çevirmişlerdir. Bu görevlerde, yörüngenin periapsis noktasını yükselmek için girişimde bulunulmadığı için,elde edilen yörünge atmosferle kesişmiş ve periapsis'ten bir sonraki geçişte, tekrar-giriş gerçekleşmiştir.
- Balon-paraşüt freni (ing: ballute) şişirilebilir bir frenleme cihazı.
- Paraşütler, atmosferi olan bir gezegene ya da doğal uyduya bir sondayı, genellikle ısı kalkanı (İng: heat shield) sayesinde atmosferde sondanın hızı büyük ölçüde azaltıldıktan sonra, indirebilmektedir.
- Hava yastıkları yüzeye inişi yumuşatabilmektedirler.
- Lithobraking (İng:Lithobraking) veya yüzeye çarparak durma, genellikle kazayla gerçekleşir. Ancak sonda'nın çarpışmadan çıkmasının beklendiği durumlarda kasıtlı olarak bu yöntem kullanılabilir (örneğin bkz: Deep Impact (uzay aracı)) ki bu durumda çok dayanıklı bir sonda gerekecektir.
Kuramsal yöntemler
Tamamen yeni fizik ilkeleri gerektirecek ya da gerçekte var olmayabilecek olan kuramsal itki yöntemleri üzerinde durulmuştur. Şimdiye kadar, bu tür yöntemler spekülasyona açıktır. [] Aşağıda bu yöntemlerin bir kısmı sıralanmıştır:
- Diametrik sürücüsü(İng: Diametric drive)
- Ayrık sürücü(İng: Disjunction drive)
- Alcubierre sürücüsü(İng: Alcubierre drive) (warp sürücüsünün bir çeşidi - İng: warp drive)
- Diferansiyel yelken (İng: Differential sail)
- Solucandelikleri – kuramsal olarak mümkün, ancak günümüzdeki teknoloji ile elde edilemez durumdadır
- Woodward etkisi
- Tepkisiz sürücü (İng: Reactionless drive) – Momentumun korunumu yasasını ihlal ettiği için kuramsal olarak imkânsız görünmektedir.
- Foton roketi (İng: Photon rocket)
- Bussard ramjet (İng: Bussard ramjet)
- "Hiper-uzay" sürücüsü (Heim Teorisi'ne dayanmaktadır. İng: Heim theory)
- Micronewton elektromanyetik iticisi - elektromanyetizma ile güç verilen bir iticide çizgisel momentum kaybı olduğu iddia edilmiştir[21]
İtki sistemlerindeki potansiyel çığır açıcı yöntemleri inceleyen (2005) bir NASA incelemesi şurada bulunabilir: Marc G Millis30 Nisan 2015 tarihinde Wayback Machine sitesinde arşivlendi. . Ayrıca NASA'nın bu alandaki araştırmasına genel bir bakış şurada bulunabilir: Çığır-açıcı İtki Fiziği2 Nisan 2004 tarihinde Wayback Machine sitesinde arşivlendi..
Yöntemler tablosu
Aşağıdaki listede daha çok popüler olan ve kanıtlanmış teknolojiler ve onları takiben aşağılara doğru gittikçe daha çok spekülatif olan yöntemler verilmiştir.
Her yöntem için dört ader değer verilmiştir. İlki etkin gaz/madde çıkış hızı: yakıtın aracı terk ettiği hıza eşittir. Bu değer itki sisteminin en önemli özelliği olmayabilir; itme, güç tüketimi ve diğer etkenler öyle olabilir. Ancak :
- Eğer delta-v gaz/madde çıkış hızından daha fazla ise, aşırı miktarlarda yakıt gerecektir (yukarıdaki hesaplamalar kısmını inceleyiniz)
- Eğer tersine gaz/madde çıkış hızı delta-v değerinden daha fazla ise, o zaman orantılı olarak daha çok enerji gerekecektir; eğer güneş enerjisinde olduğu gibi güç sınırlı ise o halde yolculuk orantılı bir şekilde çok daha uzun sürer.
İkinci ve üçüncü değerler sırasıyla ilgili yönteme has itki ve yanma süresi miktarıdır. Yerçekimsel potansiyeli olan bir alanın dışındayken, uzun bir sürede verilen küçük miktardaki itki kısa sürede verilen büyük miktardaki itki ile aynı sonucu verecektir. (Bu durum cisim büyük oranda yerçekimine maruz kalırsa geçerli değildir)
Dördüncü değer ise, roketlerdeki aşamalandırma olmadığı durumda yöntemin verebileceği en yüksek deltav-v değeridir. Roket benzeri bir itki sisteminde bu değer kütle kesri ve gaz/madde çıkış hızının bir işlevidir. Roket benzeri sistemlerde kütle kesri genellikle itki sistemin ve yakıt tankının ağırlıkları toplamıyla sınırlıdır. Bir sistemin bu sınıra ulaşabilmesi için genellikle görev-yükünün miktarının aracın toplam ağırlığına oranının göz ardı edilebilecek bir yüzdelik değer olması gerekebilmektedir ve bu yüzden bazı sistemlerin pratikteki limiti çok daha düşük olabilir.
| Yöntem | Etkin gaz/madde çıkış hızı (km/s) | İtki (N) | Ateşleme Süresi | En yüksek Delta-v (km/s) | Teknoloji Kullanılabilirlik Seviyesi (İng:TRL) |
|---|---|---|---|---|---|
| Katı-yakıtlı Roket | <~ 2.5 | <~ 107 | dakika | ~ 7 | 9:Uçuş kanıtlanmış |
| Hibrit roket | dakika | > 3 | 9:Uçuş kanıtlanmış | ||
| Tek-yakıtlı roket (Monopropellant rocket) | 1 – 3[] | 0.1 – 100[] | milisaniye–dakika | ~ 3 | 9:Uçuş kanıtlanmış |
| Sıvı yakıtlı roket | <~ 4.4 | <~ 107 | dakika | ~ 9 | 9:Uçuş kanıtlanmış |
| Elektrostatik iyon iticisi (Electrostatic ion thruster) | 15 – 210[]Şablon:Full | ay/yıl | > 100 | 9:Uçuş kanıtlanmış | |
| Hall etkisi iticisi (HET) | 8–50[] | ay/yıl | > 100 | 9:Uçuş kanıtlanmış[22] | |
| Resistojet roketi (Resistojet rocket) | 2–6 | 10−2–10 | dakika | ? | 8:Uçuş yeterliliği almış[23] |
| Arkjet roketi (Arcjet rocket) | 4–16 | 10−2–10 | dakika | ? | 8:Uçuş yeterliliği almış[] |
| Alan-yayımlı elektrikli itki (FEEP) | 100[24]–130 | 10−6[24]–10−3[24] | ay/yıl | ? | 8:Uçuş yeterliliği almış[24] |
| Atımlı plazma iticisi (PPT) | ~ 20 | ~ 0.1 | ~2,000–10,000 saat | ? | 7:Prototip uzayda ispatlandı |
| Çift mod itkili roket (Dual mode propulsion rocket) | 1 – 4.7 | 0.1 – 107 | milisaniye–dakika | ~ 3 – 9 | 7:Prototip uzayda ispatlandı |
| Güneş Yelkenleri (Solar sail) | 299792:Işık 145–750:GüneşRüzgarı | 1 AU uzaklıkta 9/km² 0.2AU uzaklıkta 230/km² 4 Iy uzaklıkta 10−10/km² | indefinite | > 40 | 9:Işık basıncıyla yönelim-denetimi uçuşu kanıtlanmış 6:Sadece uzaya çıkarılarak denendi 5:Işık-yelkeni (Light-sail) vakumda kanıtlandı |
| Üç-yakıtlı roket (Tripropellant rocket) | 2.5–5.3[] | 0.1–107[] | dakika | ~ 9 | 6:Prototip yerde ispatlandı[25] |
| Manyetoplazmadinamik itici (MPD) | 20–100 | 100 | hafta | ? | 6:Model—1 kW uzayda ispatlandı[26] |
| Nükleer termal roket (Nuclear thermal rocket) | 9[27] | 107[27] | dakika[27] | > ~ 20 | 6:Prototip yerde ispatlandı |
| Kütle sürücüleri (Mass driver) | 0–~30 | 104–108 | ay | ? | 6:Model-32MJ yerde ispatlandı |
| Kablo itki sistemi (Tether propulsion) | N/A | 1–1012 | dakika | ~ 7 | 6:Model—31.7 km uzayda ispatlandı[28] |
| Hava-zengileştirmeli roket (Air-augmented rocket) | 5–6 | 0.1–107 | saniye–dakika | > 7? | 6:Prototip yerde ispatlandı[29][30] |
| Sıvı hava döngülü motor (Liquid air cycle engine) | 4,5 | 103–107 | saniye–dakika | ? | 6:Prototip yerde ispatlandı |
| Atımlı elektrikleyici itici (PIT) | 10[31]–80[31] | 20 | ay | ? | 5:Bileşen vakumda doğrulandı[31] |
| VASIMR (VASIMR) | 10–300[] | 40–1,200[] | gün-ay | > 100 | 5:Bileşen—200 kW vakumda doğrulandı |
| Manyetik alan salınımlı yükseltilmiş itici (Magnetic field oscillating amplified thruster) | 10–130 | 0.1–1 | gün-ay | > 100 | 5:Bileşen vakumda doğrulandı |
| Solar termal roket (Solar thermal rocket) | 7–12 | 1–100 | hafta | > ~ 20 | 4:Bileşen lab'da doğrulandı[32] |
| Radyoizotop roketi (Radioisotope rocket) | 7–8[] | 1.3–1.5 | ay | ? | 4:Bileşen lab'da doğrulandı |
| Nükleer elektrikli roket (Nuclear electric rocket)(Elektrik itki yönteminin kullanıldığı gibi) | Değişken | Değişken | Değişken | ? | 4:Bileşen—400kW (SAFE) lab'da doğrulandı |
| Orion Projesi (Orion Project) (yakın ifade: nükleer atımlı itki) | 20–100 | 109–1012 | birkaç gün | ~30–60 | 3:Doğrulanmış—900 kg kavram-kanıtı(proof-of-concept)[33][34] |
| Uzay asansörü (en:Space elevator) | N/A | N/A | indefinite | > 12 | 3:Doğrulanmış kavram-kanıtı(proof-of-concept) |
| SABRE Motoru[19] | 30/4.5 | 0.1–107 | dakika | 9,4 | 3:Doğrulanmış kavram-kanıtı(proof-of-concept) |
| Manyetik yelkenli (Magnetic sail) | 145–750:GüneşRüzgarı | 70/40Mg[35] | indefinite | ? | 3:Doğrulanmış kavram-kanıtı(proof-of-concept) |
| Mini-manyetosferik plazma itkisi (Mini-magnetospheric plasma propulsion) | 200 | ~1 N/kW | ay | ? | 3:Doğrulanmış kavram-kanıtı(proof-of-concept)[36] |
| Işınla-güç-sağlanan itki (Beam-powered)/Lazer Laser (itki yöntemi lazer ile güçlendirildiği için) | Değişken | Değişken | Değişken | ? | 3:Doğrulandı—71m (kavram-kanıtı) |
| Fırlatma döngüsü/Yörüngesel halka (Launch loop/Orbital ring) | N/A | ~104 | dakika | >>11–30 | 2:Teknoloji kavramı resmileştirildi |
| Nükleer atımlı itki (Nuclear pulse propulsion) (Daedalus Projesi'nin sürücüsü) | 20–1,000 | 109–1012 | years | ~15,000 | 2:Teknoloji kavramı resmileştirildi |
| Gaz çekirdek reatör roketi (Gas core reactor rocket) | 10–20 | 103–106 | ? | ? | 2:Teknoloji kavramı resmileştirildi |
| Nükleer tuz-su roketi (Nuclear salt-water rocket) | 100 | 103–107 | half hour | ? | 2:Teknoloji kavramı resmileştirildi |
| Fisyon yelkeni (Fission sail) | ? | ? | ? | ? | 2:Teknoloji kavramı resmileştirildi |
| Parçalı Fisyon yelkeni (Fission-fragment rocket) | 15.000 | ? | ? | ? | 2:Teknoloji kavramı resmileştirildi |
| Nükleer fotonik roket (Nuclear photonic rocket) | 299.792 | 10−5–1 | yıl- yıllık | ? | 2:Teknoloji kavramı resmileştirildi |
| Fisyon roketi (Fusion rocket) | 100–1,000[] | ? | ? | ? | 2:Teknoloji kavramı resmileştirildi |
| Antimadde katalizli nükleer itki (Antimatter catalyzed nuclear pulse propulsion) | 200–4,000 | ? | gün–hafta | ? | 2:Teknoloji kavramı resmileştirildi |
| Antimedya roketi (Antimatter rocket) | 10,000–100,000[] | ? | ? | ? | 2:Teknoloji kavramı resmileştirildi |
| Bussard ramjeti (Bussard ramjet) | 2.2–20,000 | ? | süresiz | ~30,000 | 2:Teknoloji kavramı resmileştirildi |
| Yöntem | Etkin gaz/madde çıkış hızı (km/s) | İtki (N) | Ateşleme Süresi | En yüksek Delta-v (km/s) | Teknoloji Kullanılabilirlik Seviyesi (İng:TRL) |
Test etme
Uzay aracı itki sistemleri genellikle önce Dünya yüzeyinde, atmosferin içerisinde durgun olarak test edilirler, ancak pek çok sistemin tam olarak test edilebilmesi için bir vakum odasına ihtiyaç duyulmaktadır. Roketler genellikle, güvenlik sebebiyle yerleşim yerlerinden ve diğer binalardan oldukça uzakta kurulmuş olan roket motoru test tesislerinde (İng: rocket engine test facility) test edilirler. iyon iticileri (İng: ion thruster) çok daha az tehlikelidirler ve çok daha az sıkı güvenlik önlemleri ile genellikle büyükçe vakum odaları gerektirirler.
Bazı sistemler yerde yeterli bir şekilde test edilemeyebilirler ve test fırlatmaları roket fırlatma sahalarında gerçekleştirilebilir. .
Ayrıca bakınız
- Fotonik lazer iticisi (İng: Photonic laser thruster)
- Uzayda itki teknolojileri (İng: In-space propulsion technologies)
- Gezegenlerarası uzay uçuşu (İng: Interplanetary spaceflight)
- Yıldızlar arası yolculuk
- Uzay ve Havacılık Mühendisliği maddelerinin listesi (İng: Index of aerospace engineering articles)
- Roketlerin listesi (İng: Lists of rockets)
- Manyetik yelken (İng: Magnetic sail)
- Yörünge manevrası (İng: Orbital maneuver)
- Yörünge mekaniği
- Plazma itki motoru (İng: Plasma propulsion engine)
- Atımlı patlama motoru (İng: Pulse detonation engine)
- Roket
- Roket motoru çıkışı (İng: Rocket engine nozzle)
- Yapay uydu
- Güneş yelkeni
- Özgül itici kuvvet
- Olasılıksal elektrodinamik (İng: Stochastic electrodynamics)
- Tsiolkovski roket denklemi (İng: Tsiolkovsky rocket equation)
Notes
- ^ Nesneler yörünge hareket halinde iken ve hiçbir şey sabit durmuyorken, akla şu soru gelebilir, "neye göre sabit?". Cevap enerjinin sıfır olmasındadır (ve bu durum yerçekimi olmadığı zaman içindir ancak yerçekimi yokluğu durumu biraz karmaşıklaştırmaktadır), ayrıca gaz/madde çıkış hızı, roket motorları açılmadan önceki ilk hareketine göre durmalıdır. Diğer referans çerçevelerinden bu hesaplamaları yapmak mümkünldür, ancak çıkış maddesinin/gazının ve yakıtın kinetik enerjilerinin göz önünde bulundurlması gerekmektedir. Newton fiziği mekaniğine göre roketin başlangıç konumu, roket/yakıt/çıkış gazı bütününün kütle çerçevesinin merkezidir (centre of mass frame) ve herhangi bir çerçeveye göre en az enerjiye sahiptir.
Kaynakça
- ^ Hess, M.; Martin, K. K.; Rachul, L. J. (7 Şubat 2002). "Thrusters Precisely Guide EO-1 Satellite in Space First". NASA. 6 Aralık 2007 tarihinde kaynağından arşivlendi. Erişim tarihi: 30 Temmuz 2007.
- ^ Phillips, Tony (30 Mayıs 2000). "Solar S'Mores". NASA. 13 Ocak 2010 tarihinde kaynağından arşivlendi. Erişim tarihi: 30 Temmuz 2007.
- ^ Olsen, Carrie (21 Eylül 1995). "Hohmann Transfer & Plane Changes". NASA. 15 Temmuz 2007 tarihinde kaynağından arşivlendi. Erişim tarihi: 30 Temmuz 2007.
- ^ Staff (24 Nisan 2007). "Interplanetary Cruise". 2001 Mars Odyssey. NASA. 25 Ağustos 2009 tarihinde kaynağından arşivlendi. Erişim tarihi: 30 Temmuz 2007.
- ^ Doody, Dave (7 Şubat 2002). "Chapter 4. Interplanetary Trajectories". Basics of Space Flight. NASA JPL. 17 Temmuz 2007 tarihinde kaynağından arşivlendi. Erişim tarihi: 30 Temmuz 2007.
- ^ Hoffman, S. (Ağustos 20–22, 1984). "A comparison of aerobraking and aerocapture vehicles for interplanetary missions". AIAA and AAS, Astrodynamics Conference. Seattle, Washington: American Institute of Aeronautics and Astronautics. ss. 25 p. 27 Eylül 2007 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2007.
- ^ Anonymous (2016). "F.A.Q. on Solar Sailing". The Planetary Society. 25 Kasım 2015 tarihinde kaynağından arşivlendi. Erişim tarihi: 28 Ocak 2016.
- ^ Rahls, Chuck (7 Aralık 2005). "Interstellar Spaceflight: Is It Possible?". Physorg.com. 1 Mart 2012 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2007.
- ^ Zobel, Edward A. (2006). "Summary of Introductory Momentum Equations". Zona Land. 21 Şubat 2010 tarihinde kaynağından arşivlendi. Erişim tarihi: 2 Ağustos 2007.
- ^ a b Benson, Tom. "Guided Tours: Beginner's Guide to Rockets". NASA. 14 Ağustos 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 2 Ağustos 2007.
- ^ a b 19-1 numaralı denklem, Roket itki öğeleri 7. baskı- Sutton
- ^ Choueiri, Edgar Y. (2004). "A Critical History of Electric Propulsion: The First 50 Years (1906–1956)". Journal of Propulsion and Power. 20 (2). ss. 193-203. doi:10.2514/1.9245. 4 Mart 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 4 Nisan 2016.
- ^ Drachlis, Dave (24 Ekim 2002). "NASA calls on industry, academia for in-space propulsion innovations". NASA. 6 Aralık 2007 tarihinde kaynağından arşivlendi. Erişim tarihi: 26 Temmuz 2007.
- ^ "NASA's Nanosail-D Becomes the First Solar Sail Spacecraft to Orbit the Earth | Inhabitat - Green Design Will Save the World". 20 Şubat 2011 tarihinde kaynağından arşivlendi. Erişim tarihi: 25 Nisan 2016.
- ^ "Space Vehicle Control". University of Surrey. 7 Mayıs 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 8 Ağustos 2015.
- ^ King-Hele, Desmond (1987). Satellite orbits in an atmosphere: Theory and application. Springer. ISBN 978-0-216-92252-5. 24 Aralık 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 25 Nisan 2016.
- ^ Tsiotras, P.; Shen, H.; Hall, C. D. (2001). "Satellite attitude control and power tracking with energy/momentum wheels". Journal of Guidance, Control, and Dynamics. 43 (1). ss. 23-34. Bibcode:2001JGCD...24...23T. doi:10.2514/2.4705. ISSN 0731-5090.
- ^ Dykla, J. J.; Cacioppo, R.; Gangopadhyaya, A. (2004). "Gravitational slingshot". American Journal of Physics. 72 (5). ss. 619-000. Bibcode:2004AmJPh..72..619D. doi:10.1119/1.1621032.
- ^ a b Anonymous (2006). "The Sabre Engine". Reaction Engines Ltd. 24 Aralık 2015 tarihinde kaynağından arşivlendi. Erişim tarihi: 26 Temmuz 2007.
- ^ Harada, K.; Tanatsugu, N.; Sato, T. (1997). "Development Study on ATREX Engine". Acta Astronautica. 41 (12). ss. 851-862. doi:10.1016/S0094-5765(97)00176-8.
- ^ Dimitri S.H. Charrier (2012). "Micronewton electromagnetic thruster". Applied Physics Letters (Applied Physics Letters). 101. s. 034104. 6 Mayıs 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 14 Haziran 2016.
- ^ Hall etkisi iticileri Sovyet/Rus uydularında onlarca yıl boyunca kullanılmışlardır.
- ^ A Xenon Resistojet Propulsion System for Microsatellites (Surrey Space Centre, University of Surrey, Guildford, Surrey) (Purchasable document)
- ^ a b c d "SITAEL S.p.A. - Field Emission Electric Propulsion". 4 Haziran 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 15 Haziran 2016.
- ^ "RD-701". 9 Temmuz 2006 tarihinde kaynağından arşivlendi. Erişim tarihi: 15 Haziran 2016.
- ^ "Google Çeviri". 28 Nisan 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 8 Ekim 2020.
- ^ a b c "RD-0410". 8 Nisan 2009 tarihinde kaynağından arşivlendi. Erişim tarihi: 15 Haziran 2016.
- ^ "Young Engineers' Satellite 2". 23 Eylül 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 15 Haziran 2016.
- ^ "Gnom". 2 Ocak 2010 tarihinde kaynağından arşivlendi. Erişim tarihi: 15 Haziran 2016.
- ^ "NASA GTX". 22 Kasım 2008 tarihinde kaynağından arşivlendi. Erişim tarihi: 15 Haziran 2016.
- ^ a b c "The PIT MkV pulsed inductive thruster" (PDF). 11 Şubat 2014 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 15 Haziran 2016.
- ^ Pratt & Whitney Rocketdyne Wins $2.2 Million Contract Option for Solar Thermal Propulsion Rocket Engine 8 Ağustos 2016 tarihinde Wayback Machine sitesinde arşivlendi. (Press release, June 25, 2008, Pratt & Whitney Rocketdyne - Rocketdyne)
- ^ "Operation Plumbbob". Temmuz 2003. 14 Aralık 2015 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2006.
- ^ Brownlee, Robert R. (Haziran 2002). "Learning to Contain Underground Nuclear Explosions". 10 Mart 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2006.
- ^ PSFC/JA-05-26:Physics and Technology of the Feasibility of Plasma Sails 27 Şubat 2009 tarihinde Wayback Machine sitesinde arşivlendi., Journal of Geophysical Research, September 2005
- ^ "MagBeam". 3 Ocak 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 15 Haziran 2016.
Dış bağlantılar
- NASA: İtki sistemlerine başlangıç kılavuzu21 Şubat 2011 tarihinde Wayback Machine sitesinde arşivlendi.
- NASA Çığı-açan İtki Fiziği Projesi (Breakthrough Propulsion Physics project)2 Nisan 2004 tarihinde Wayback Machine sitesinde arşivlendi.
- Roket İtki sistemi12 Haziran 2006 tarihinde Wayback Machine sitesinde arşivlendi.
- Gelişmiş Kuramsal itki Sistemi (Advanced Theoretical Propulsion) dergisi
- Değişik Roketler29 Mayıs 2010 tarihinde Wayback Machine sitesinde arşivlendi.
- Dünyadan-yörüngeye Taşımacılık tarhiçesi15 Haziran 2016 tarihinde Wayback Machine sitesinde arşivlendi.
- Uzay yolculuğu itki sistemleri1 Haziran 2016 tarihinde Wayback Machine sitesinde arşivlendi. - Greg Goebel tarafından hazırlanan ayrıntılı bir araştırma
- howstuffworks.com sitesindeki roket motorları9 Eylül 2015 tarihinde Wayback Machine sitesinde arşivlendi.
- Johns Hopkins University, Kimyasal İtki Bilgi Çözümleme Merkezi5 Ağustos 2014 tarihinde Wayback Machine sitesinde arşivlendi.
- Sıvı Roket Motoru Termodinamik Çözümleme aracı17 Kasım 2010 tarihinde Wayback Machine sitesinde arşivlendi.
- SITAEL (ALTA-SPACE şirketini bünyesine katmıştır)13 Haziran 2016 tarihinde Wayback Machine sitesinde arşivlendi.
- NASA Jet İtki Laboratuvarı - Jet Propulsion Laboratory5 Nisan 2013 tarihinde Wayback Machine sitesinde arşivlendi.
- Smithsonian Ulusal Hava ve Uzay Müze'sinin "Nesneler nasıl uçar?" konulu sitesi16 Haziran 2016 tarihinde Wayback Machine sitesinde arşivlendi.

















{kind=link}