Servo motor
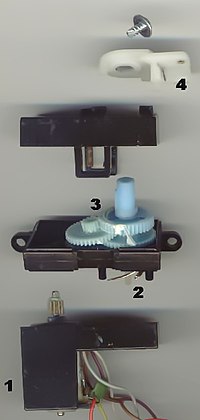
1. elektrik motoru
2. voltmetre
3. dişli çark
4. eyleyici kol
Servo, herhangi bir mekanizmanın işleyişini hatayı algılayarak yan bir geri besleme düzeneğinin yardımıyla denetleyen ve hatayı gideren otomatik aygıttır. Robot teknolojisinde en çok kullanılan motor çeşididir. Bu sistemler mekanik olabileceği gibi elektronik, hidrolik, pnömatik veya başka alanlarda da kullanılabilmektedir. Servo motorlar; çıkış, mekaniksel konum, hız veya ivme gibi değişkenlerin kontrol edildiği, özetle hareket kontrolü yapılan bir düzenektir. Servo motorlar batlerli motordurlar Servo motor içerisinde herhangi bir motor AC, DC veya step motor bulunmaktadır.[] Ayrıca sürücü ve kontrol devresini de içerisinde barındırmaktadır.
DC servo motorlar, genel olarak bir DC motoru olup, motora gerekli DC aşağıdaki metotlardan elde edilir.
1- Bir elektrik yükselteçten.
2- AC akımın doyumlu reaktörden geçirilmesinden.
3- AC akımın tristörden geçirilmesinden.
4- Amplidin, retotrol, regüleks gibi dönel yükselteçlerden.
DC servo motorlar çok küçük güçten çok büyük güce kadar imal edilirler (0,05 HP'den 1000 HP'ye kadar). Bu motorlar klasik DC motorlar gibi imal edilirler. Bu motorlar küçük yapılıdır ve endüvileri (yükseklik. uzunluk / Çap oranıyla) kutup atalet momentini minimum yapacak şekilde tasarlanırlar. Küçük çaplı ve genellikle içerisinde kompanzasyon sargısı olan, kuvvetli manyetik alanı boyu uzun doğru akım motorlarına da servo motor denir. DC servo motor çalışma prensibi açısından aslında, Statoru Daimi Mıknatıs bir DC motordur. Manyetik alan ile içinden akım geçirilen iletkenler arasındaki etkileşim nedeniyle bir döndürme momenti meydana gelir. Bu döndürme momenti manyetik alan vektörü ile sargı akım vektörü arasındaki açı 90° olduğunda maksimum değerini alır. Bir DC servo motorda fırçaların konumu, her iki dönüş yönü için de döndürme momenti açısının 90° olmasını sağlayacak şekilde belirlenmiştir. Kolektör segmentlerinin fazla olması neticesinde momentin sıfır bir noktada rotorun hareketsiz kalması engellenmiş olur.
Sanayide kullanılan çeşitli doğru akım motorları vardır. Servo sistemlerde kullanılan doğru akım motorlarına ise DC servo motorlar adı verilir. DC servo motorlarda rotor eylemsizlik momenti çok küçüktür. Bu sebepten piyasada çıkış momentinin eylemsizlik momentine oranı çok büyük olan motorlar bulunur.
Bazı DC servo motorların çok küçük zaman sabitleri vardır. Düşük güçlü DC servo motorlar piyasada genellikle bilgisayar kontrollü cihazlarda (disket sürücüler, teyp sürücüleri, yazıcılar, kelime işlemciler, tarayıcılar vs.) kullanılırlar. Orta ve büyük güçlü servo motorlar ise sanayide genellikle robot sistemleri ile sayısal denetimli hassas diş açma tezgâhlarında kullanılır. DC motorlarda alan sargıları rotor sargılarına seri veya paralel bağlanır. Endüvi sargılarından bağımsız olarak uyartılan alan sargılarının akısı endüvi sargılarından geçen akımın fonksiyonu değildir. Bazı DC motorlarda manyetik akı sabittir. Uyarma sargıları endüviden bağımsız olan veya sabit mıknatısla uyartılan motorlarda hız kontrolü endüvi gerilimi ile yapılabilir. Bu tip kontrol yöntemine endüvi kontrol yöntemi denir.
Uyarma sargılarının yarattığı akı ile yapılan denetlemede ise endüvi akımı sabit tutulur. Statorda bulunan uyartım sargılarının yarattığı akının kontrolü ile hız ayarlanır. Bu tip motorlara alan kontrollü motorlar denir. Fakat rotor sargılarından geçen akımın sabit tutulabilmesi ciddi bir problemdir. Zira rotor akımı yükün ve kaynağın birer fonksiyonudur. Endüvi kontrollü motorlara göre alan kontrollü motorların alan sabitleri daha büyüktür. Büyük aralıklarda değişen hız ayarlarında rotor geriliminin değiştirilmesi; buna karşılık küçük aralıklarda hassas hız ayarı gereken yerlerde ise alan sargılarının yaratmış olduğu manyetik akı hız kontrolü yöntemi tercih edilir.
DC servo motorlar genellikle “elektronik hareketli denetleyiciler” adı verilen servo sürücüler ile kontrol edilirler. Servo sürücüler servo motorun hareketini kontrol eder. Kontrol edilen büyüklükler çoğu zaman noktadan noktaya konum kontrolü, hız kontrolü ve ivme programlamasıdır. PWM (Pulse width modulation) tekniği adı verilen darbe genişlik modülasyonu genellikle robot kontrol sistemlerinde, sayısal kontrol sistemlerinde ve diğer konum denetleyicilerinde kullanılır.
Servomotor ve AC Servomotorun karşılaştırılması
Fırçasız servo motorlar DC servo motorların bakım gereksinimlerini ortadan kaldırmak amacıyla geliştirilmiştir. Modern servo sistemlerde kullanılan fırçasız servo motorların en önemli üstünlüğü fırça ve komütatör elemanlarının bulunmamasıdır. Bu nedenle fırçaların bakımı diye bir olaydan bahsedilemez ve fırçalardan kaynaklanan birçok problem önlenmiş olur.
Kolektörlü DC servo motorlarda oluşan problemler bazen çok açık bir şekilde belli olmaz. Bazen fırçalarda olan kirlenme bile problem oluşturabilir. Fırçaların performansı ve ömrü atmosferik şartlarla bile değiştiğinden, değişik ortam koşullarında değişik yapılı fırçalar kullanılabilmektedir. Fırçasız servo motorlarda verim, eş ölçüdeki bir DC servo motora oranla daha yüksektir ve fırçaların sürtünme etkisi olmadığından, sürtünme kuvveti verime katkıda bulunur. Kolektör ve fırça aksamının yokluğu motor boyunu düşürür. Bu sadece motor hacmini düşürmekle kalmaz rotor destek rulmanları arasındaki mesafe ve rotor boyunun kısalması dolayısıyla rotorun yanal rijitliği de arttırılmış olmaktadır. Bu özellik hız/eylemsizlik oranına gereksinim duyulan uygulamalarda önemlidir.
Fırçasız konfigürasyonda sarımların sabit stator içine sarılması sebebiyle ısı yalıtımı için daha fazla en kesit alanı sağlanabilmekte ve sargılarda oluşabilecek ısı artışı algılama elemanları vasıtasıyla kolayca algılanabilmektedir. Modern servo sistemlerde pozisyon sinyalinin belirlenmesi amacıyla bir kodlayıcı (encoder) veya çözücü (resolver) kullanılır. Kodlayıcı ve motorun tek bir ana iskelet üzerinde toplanması ile sistem daha kompakt bir yapıda olmaktadır. Bu motor yapısında manyetik akıyı üretmek için gerekli olan mıknatıs rotora monte edildiğinden, döner-alan tipli motor yapısındadır. Senkron motor tipli fırçasız servo motorların yapılarının doğru akım servo motorlarından farklı olması nedeniyle bu tipteki servo motorlar fırçasız DC servo motor olarak adlandırılır.
DC servo motorlardaki kolektörün aksine fırçasız DC servo motorlar akımı yarı iletken güç elektroniği elemanları ile doğrulturlar. Diğer yönden rotor manyetik alanının kodlayıcı vasıtası ile algılanıp, algılanan bu pozisyona uygun düşecek şekilde stator sarımlarına üç fazlı alternatif akım verilmesi dolayısıyla kalıcı mıknatıslı senkron motor tipindeki fırçasız servo motorlar aynı zamanda AC servo motorlar olarak da adlandırılır. Fırçasız servo motorlarda rotor manyetik alanı ile statora verilen akımlar dikey şekilde kontrol edildiği takdirde DC servo motorlarla aynı olan hız-moment karakteristikleri elde edilir. Servo motorlar kullanımları gereği çok sık şekilde ivmelenme ve yavaşlama işlemlerine maruz kaldıklarından, maksimum moment değeri anma momentlerinin katbekat fazlası olmalıdır. DC servo motorlarda anma momentlerinin aşılması durumunda komütatör aksamında kıvılcımlaşma olayı meydana gelir. Aynı şekilde hız arttıkça moment değeri de çok hızlı bir şekilde düşer.
Kaynakça
- Bilgiustam.com Servo Motor Nedir? Nasıl Çalışır? » Bilgiustam 23 Nisan 2011 tarihinde Wayback Machine sitesinde arşivlendi.