Robotik, robotların tasarımı, üretimi ve kullanımı ile ilgilenen çok disiplinli bir bilim dalıdır. Makine mühendisliği, uçak mühendisliği, uzay mühendisliği, elektronik mühendisliği, bilgisayar mühendisliği, mekatronik mühendisliği ve kontrol mühendisliği dallarının ortak çalışma alanıdır. Robotlar bir yazılım aracılığıyla yönetilen ve yararlı bir amaç için iş ve değer üreten karmaşık makinelerdir.

Makine, bir iş yapmak için kuvvet uygulamak ve hareketi kontrol etmek için güç kullanan fiziksel bir sistemdir. Terim genellikle motor kullanan yapay cihazlara veya moleküler makineler gibi doğal biyolojik makromoleküllere de uygulanır.
Robot, otonom veya önceden programlanmış görevleri yerine getirebilen elektro-mekanik bir cihazdır. Güncel tanımı ile robotlar, elektronik ve mekanik birimlerden oluşan, algılama yeteneğine sahip olan ve programlanabilen cihazlardır. Başka bir tanımla robotlar, canlıların işlevlerini ve davranışlarını taklit edebilen, fiziksel yeteneklere ve yapay zekâya sahip, disiplinler arası öğeler içeren mühendislik ürünleridir.

Açısal momentum, herhangi bir cismin dönüş hareketine devam etme isteğinin bir göstergesidir ve bu nicelik cismin kütlesine, şekline ve hızına bağlıdır. Açısal momentum bir vektör birimidir ve cismin belirli eksenler üzerinde sahip olduğu dönüş eylemsizliği ile dönüş hızını ifade eder.

Sayısal kontrol veya tam ismi ile bilgisayarlı sayısal kontrol, işleme takımlarının ve 3B yazıcıların bir bilgisayar aracılığıyla otomatik olarak kontrol edilerek şekil verilecek iş parçasının üzerinde operasyonda bulunan talaşlı imalat işlemidir. Bir CNC makinesi, kodlar ile programlanmış talimatı takip ederek manuel bir operatöre ihtiyaç duymadan, spesifikasyonları karşılamak için belli bir malzeme bazındaki iş parçasını istenilen şekle gelene kadar, manuelden daha hassas bir şekilde işler.

Matematikte kutupsal koordinat sistemi veya polar koordinat sistemi, noktaların birer açı ve Kartezyen koordinat sistemindeki orijinin eşdeğeri olup "kutup" olarak bilinen bir merkez noktaya olan uzaklıklar ile tanımlandığı, iki boyutlu bir koordinat sistemidir. Kutupsal koordinat sistemi, matematik, fizik, mühendislik, denizcilik, robot teknolojisi gibi birçok alanda kullanılır. Bu sistem, iki nokta arasındaki ilişkinin açı ve uzaklık ile daha kolay ifade edilebildiği durumlar için özellikle kullanışlıdır. Kartezyen koordinat sisteminde, böyle bir ilişki ancak trigonometrik formüller ile bulunabilir. Kutupsal denklemler, çoğu eğri tipi için en kolay, bazıları içinse yegâne tanımlama yöntemidir.
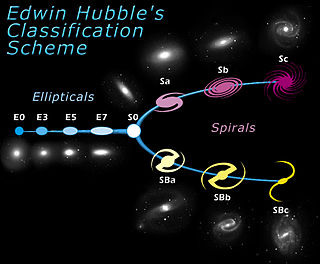
Biçimsel galaksi sınıflandırması, astronomların gökadaları görünüşlerine göre gruplara ayırdıkları bir sınıflandırma sistemidir. Gökadaları görünüşlerine göre sınıflandırmak için kullanılan birkaç şema bulunmaktadır. Bunların en bilineni Edwin Hubble tarafından tasarlanan ve Gérard de Vaucouleurs ile Allan Sandage tarafından genişletilen Hubble düzenidir. Gökada sınıflandırması ve morfolojisi artık büyük ölçüde hesaplama yöntemleri ve fiziksel morfoloji kullanılarak yapılır.

SolidWorks, bilgisayar destekli 3 boyutlu katı modelleme ve tasarım yazılımıdır.

İşletim sistemi çekirdeği, kısaca çekirdek (kernel), işletim sistemindeki her şeyin üzerinde denetimi olan merkezi bileşenidir. Uygulamalar ve donanım seviyesindeki bilgi işlemleri arasında bir köprü görevi görür. Çekirdeğin görevleri sistemin kaynaklarını yönetmeyi de kapsamaktadır. Genellikle çekirdek, işletim sisteminin temel bir elemanı olarak, yazılımın fonksiyonunu yerine getirebilmesi için kontrol etmesi gereken kaynaklar için düşük seviye soyutlama katmanı sağlayabilir. İşletim sistemi görevleri, tasarımları ve uygulanmalarına göre farklı çekirdekler tarafından farklı şekillerde yapılır. Sistem açılırken belleğe yüklenir ve sistem kapatılıncaya kadar ana bellekte kalır.
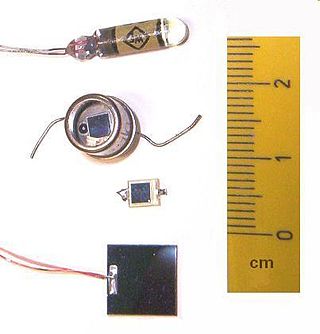
Fotodiyot, görünür ışık, kızılötesi veya ultraviyole radyasyon, X ışınları ve gama ışınları gibi foton radyasyonuna duyarlı bir yarı iletken diyottur. Fotodiyot, fotonları emdiğinde akım veya voltaj Fotovoltaikleri üreten bir PN yarı iletken malzemedir.Semiconductor Optoelectronics .
Sarmal, burgu şekilli, üç boyutlu bir şekildir. Sarmal şekilli gündelik nesnelere örnek olarak silindirik yay, vida ve minare merdiveni gösterilebilir. Sarmallar biyolojide de yer alır, DNA molekülü birbirine sarılmış iki sarmaldan oluşur, çoğu proteinde de alfa sarmal olarak adlandırılan sarmal yapılar bulunur. Sıfat hali için sarmal kullanılır.

Dönme ya da dönüş; bir merkeze bağlı olarak dairesel hareket yapan cisimlerin hareketine denir. Üç boyutlu cisimler her zaman hayali bir dönüş eksen çizgisi etrafında döner. Eğer bu eksen cismin gövdesinden ve kütle merkezinden geçerse, cismin kendi etrafında döndüğü söylenir. Bir dış noktaya göre merkez seçilirse bu harekete dönüş veya orbital dönüş denir ve genellikle yerçekimi tarafından oluşturulur.

Matematikte Hilbert uzayı, sonlu boyutlu Öklit uzayında uygulanabilen lineer cebir yöntemlerinin genelleştirilebildiği ve sonsuz boyutlu da olabilen bir vektör uzayıdır. Daha kesin olarak, bir Hilbert uzayı, uzayın tam metrik uzay olmasını sağlayan bir uzaklık fonksiyonu üreten bir iç çarpımla donatılmış bir vektör uzayıdır. Bir Hilbert uzayı, bir Banach uzayının özel bir durumudur. Matematik, fizik ve mühendislikte sıkça kullanılmaktadır. Kuantum mekaniğiyle uyumludur. Adını David Hilbert'ten almaktadır.
Matematikte, uzunluğu 1 olan ve uzayda bir norma sahip olan vektöre birim vektör denir. Birim vektör genellikle ‘û‘ gibi şapkalı ve küçük harflerle ifade edilir. Normalize vektör veya versor olmayan bir sıfır vektörü u ile eş yönlü olan birim vektörü u


Birim çember Matematikte, yarıçapı bir birim olan çembere birim çember denir. Çoğunlukla, özellikle trigonometride, Öklid düzlemine göre Kartezyen koordinat sisteminde, merkezi orijin üzerinde (0,0) olan ve yarıçapı bir birim olan çemberdir. n birim çember sıklıkla S1; olarak ifade edilir. Genellikle daha büyük boyutları ise birim küredir. (x, y) birim çember üzerinde bir nokta olduğunda, |x| ve |y|, dik olan ve hipotenüsü bir olan üçgenin diğer kenar uzunluklarıdır. Bu nedenle, Pisagor teoremine göre, x ve y bu denklemi karşılamaktadır.


Birçok türün canlıları her biri cinsiyet veya eşey olarak bilinen dişi ve eril çeşitlerine özelleşmiştir. Eşeyli üreme genetik özelliklerin karışımı ve birleşimini içerir: Gamet olarak bilinen özelleşmiş bu hücreler her bir ebeveynden özelliklerini kalıtsal yolla alan yavrular oluşturmak için birleşir. Gametler form ve fonksiyonda özdeş (izogami) olabilir, fakat birçok durumda iki cinsiyete özgü gamet (heterogamet) tiplerinin oluşması (anizogami) gibi bir asimetri evrilebilir. Eril gametleri küçüktür, hareket edebilirler ve genetik bilgilerini bir mesafe boyunca taşıyabilmeye uyum sağlamışlardır; dişi gametleri ise büyüktür, hareket edemezler ve genç canlının ilk gelişimi için gerekli olan besini barındırırlar. İnsanlar ve diğer memeliler arasında, eriller genellikle XY kromozomlarını taşırken, dişiler ise genellikle XX kromozomlarını taşırlar ve XY cinsiyet belirleme sisteminin bir parçasıdır.

Endüstriyel robot, ISO 8373 standardına göre üretim için kullanılan robot sistemidir. Endüstriyel robotlar otomatiktir, programlanabilir ve üç veya daha fazla eksende hareket edebilir.

Yazılım kategorileri, yazılım gruplarıdır. Yazılımın bu kategoriler açısından anlaşılmasını sağlamaktadırlar. Farklı sınıflandırma şemaları, yazılımların farklı yönlerini dikkate alır.

Bilgisayarlı görü, bilgisayarların dijital görüntülerden veya videolardan nasıl bir anlam kazanabileceğiyle ilgilenen disiplinler arası bilimsel bir alandır. Mühendislik yöntemleriyle, insan görsel sisteminin yapabileceği görevleri anlamaya ve otomatikleştirmeye çalışmaktadır.

Robot kol, insan kolu ile benzer işlevleri olan ve genellikle programlanabilir mekanik bir koldur. Kol, mekanizmanın toplamı veya karmaşık bir robotun parçası olabilir. Böyle bir manipülatörün bağlantıları dönme hareketine veya doğrusal yer değiştirmeyi sağlayan eklemlerle bağlanır. Manipülatör bağlantıları kinematik bir zincir oluşturur. Manipülatörün kinematik zincirinin ucuna son efektör denir ve insan eline benzer.