
Matematik ; sayılar, felsefe, uzay ve fizik gibi konularla ilgilenir. Matematikçiler ve filozoflar arasında matematiğin kesin kapsamı ve tanımı konusunda görüş ayrılığı vardır.

Fizik disiplininde, kuvvet bir cismin hızını değiştirmeye zorlayabilen, yani ivmelenmeye sebebiyet verebilen - hızında veya yönünde bir değişiklik oluşturabilen - bir etki olarak tanımlanır, bu etki diğer kuvvetlerle dengelenmediği müddetçe geçerlidir. Itme ya da çekme gibi günlük kullanımda yer alan eylemler, kuvvet konsepti ile matematiksel bir netliğe ulaşır. Kuvvetin hem büyüklüğü hem de yönü önemli olduğundan, kuvvet bir vektör olarak ifade edilir. Kuvvet için SI birimi, newton (N)'dur ve genellikle F simgesi ile gösterilir.

Mekanik, fiziğin fiziksel nesnelerin hareketleriyle, özellikle kuvvet, madde ve hareket arasındaki ilişkilerle ilgili alanıdır. Nesnelere uygulanan kuvvetler yer değiştirmeler veya bir nesnenin çevresine göre konumunda değişikliklerle sonuçlanır. Fizik'in bu dalının kökenleri Antik Yunanistan'da Aristoteles ve Arşimet'in yazılarında bulunur.. Erken modern dönem sırasında, Galileo, Kepler ve Newton gibi bilim adamları şimdiki klasik mekaniğin temellerini attılar. Klasik mekanik, duran veya ışık hızından çok daha düşük hızlarla hareket eden cisimlerle ilgili klasik fizikin bir dalıdır. Kuantum aleminde olmayan cisimlerin hareketini ve üzerindeki kuvvetleri inceleyen bilim dalı olarak da tanımlanabilir. Alan bugün kuantum teorisi açısından daha az anlaşılmıştır.
Belirme, karmaşık bir sistemde yeni ve uyumlu yapılar, desenler ve özelliklerin ortaya çıkması sürecidir. Belirmiş fenomen, sistemin elemanları arasında etkileşim dinamikleri sonucunda oluşur. Belirmiş fenomen çoğunlukla görece basit parçaların görece basit etkileşimlerinden çıkan beklenmedik, sıradan olmayan sonuçlardır. Karmaşık bir sistemi daha az karmaşık olandan ayıran şey, karmaşık sistemde bazı davranımların ve desenlerin, elemanların arasındaki ilişkilerin dokusu gereği ortaya çıkamalarıdır.

Mıknatıssal veya manyetik alan, bir mıknatısın mıknatıssal özelliklerini gösterebildiği alandır. Mıknatısın çevresinde oluşan çizgilere de, mıknatısın o bölgede oluşturduğu manyetik alan çizgileri denir. Manyetik alan çizgilerinin yönü kuzeyden (N) güneye (S) doğrudur. Manyetik alan hareket eden elektrik yükleri tarafından, zamanla değişen elektrik alanlardan veya temel parçacıklar tarafından içsel olarak üretilir. Manyetik alan vektörel bir büyüklüktür. Yani herhangi bir noktada yönü ve şiddeti ile tanımlanır. Manyetik alan B harfiyle temsil edilir. SI birimi Sırp bilim insanı Nikola Tesla'nın soyadı Tesladır. Manyetik alan Lorentz kuvveti kullanılarak ölçüldüğü için birimi coulumb-metre/saniye başına Newtondur. Saniye başına coulomba bir amper dendiği için T=N(Am)-1 olarak da geçer. Tesla günlük olaylar için çok büyük bir birim olduğundan pratikte, gauss (G) kullanılmaktadır. 1 T=104 G

Sibernetik (Yunanca kybernétes: "dümenci") veya güdüm bilimi; canlı ve cansız tüm karmaşık sistemlerin denetlenmesi ve yönetilmesini inceleyen bilim dalıdır.

Robot, otonom veya önceden programlanmış görevleri yerine getirebilen elektro-mekanik bir cihazdır. Güncel tanımı ile robotlar, elektronik ve mekanik birimlerden oluşan, algılama yeteneğine sahip olan ve programlanabilen cihazlardır. Başka bir tanımla robotlar, canlıların işlevlerini ve davranışlarını taklit edebilen, fiziksel yeteneklere ve yapay zekâya sahip, disiplinler arası öğeler içeren mühendislik ürünleridir.

SolidWorks, bilgisayar destekli 3 boyutlu katı modelleme ve tasarım yazılımıdır.
Matematiksel model, bir sistemin matematiksel kavramlar ve dil kullanılarak tanımlanmasıdır. Matematiksel model geliştirme süreci, matematiksel modelleme olarak adlandırılır. Matematiksel modeller, doğa bilimlerinde ve mühendislik disiplinlerinde bunun yanı sıra sosyal bilimlerde kullanılır. Matematiksel modelleri daha çok fizikçiler, mühendisler, istatistikçiler, operasyon araştırma analistleri ve ekonomistler kullanır. Model, bir sistemi açıklamaya, farklı bileşenlerin etkilerini incelemeye ve bir davranış hakkında öngörüde bulunmak için yardımcı olabilir.
Mach prensibi, belirli bir bölgedeki hareketin başka bir referans noktasına göre hareketin belirlenmesi büyük ölçekteki madde dağılımına dayalı olduğunu belirtir. Teorik fizikteki, yerçekimi teorilerinden olan Mach prensibi Einstein tarafından isimlendirilmiştir. Fikir filozof Ernst Mach'a atfedilir.

Lenart küresi, Öklityen olmayan geometriler için özellikle de küresel geometri, küresel trigonometri ve projektif geometri için bir eğitim ve öğretim modelidir. Lenart küresi, küre üzerindeki çokgenleri ve kenar-açı arasındaki ilişkileri görselleştirmek için bir “küresel yazı tahtası” olarak adlandırılır. Küre, The Geometer’s Sketchpad, GeoGebra ve Spherical Easel gibi görselleştirme yazılımları gibi kullanılır.. Lenart küresinin egitim uygulamaları Geodesy, GIS, astronomi, geometri, ışın izleme (grafik), perspektif (grafiksel), trigonometri ve göksel navigasyonu içerir.

Sabit bir eksen etrafında dönme dönme hareketinin özel bir durumudur. Sabit eksen hipotez yönünü değiştirerek bir eksen olasılığını dışlar ve salınım devinim gibi olguları tarif edemez. Euler’in dönme teoremine göre, Aynı zamanda, sabit eksenler boyunca eş zamanlı rotasyon imkânsızdır. Eğer iki rotasyona aynı anda kuvvet uygulanırsa, rotasyonun yeni ekseni oluşur.

Lagrange mekaniği, klasik mekaniğin yeniden formüle edilmesidir. İtalyan-Fransız matematikçi ve astronom Joseph-Louis Lagrange tarafından 1788’de geliştirilmiştir.
Hesaplamalı kimya, kimya problemlerini çözmeye yardımcı olmak için bilgisayar simülasyonunu kullanan bir kimya dalıdır. Moleküllerin, katıların yapı ve özelliklerini hesaplamak için verimli bilgisayar programlarına dahil edilmiş teorik kimya yöntemlerini kullanır. Bu yöntemlerin kullanılmasının nedeni, hidrojen moleküler iyonu ile ilgili nispeten yeni sonuçlar dışında, kuantum çok-gövdeli(many-body) problemlerin analitik olarak çözülemez oluşudur. Hesaplama sonuçları normal olarak kimyasal deneylerle elde edilen bilgileri tamamlarken, bazı durumlarda gözlemlenmeyen kimyasal olayları da tahmin edebilmektedir. Yeni ilaç ve materyallerin tasarımında yaygın olarak kullanılmaktadır.
Joule veya jul, Uluslararası Birim Sistemi'nde enerji, iş veya ısı miktarından türetilmiş bir ölçü birimidir. Bir metre üzerinden bir newtonluk kuvvet uygulanarak harcanan enerjiye veya iki ucu arasında bir voltluk gerilim farkı olan bir devre elemanı üzerinden geçen bir amperlik akımınin tükettiği enerjiye eşittir. Adını İngiliz fizikçi James Prescott Joule'dan (1818-1889) almıştır.

Yapı, maddi bir nesne veya sistemdeki birbiriyle ilişkili unsurların düzenlenmesi ve organizasyonu veya bu şekilde organize edilmiş nesne veya sistemdir. Maddi yapılar, binalar ve makineler gibi insan yapımı nesneleri ve biyolojik organizmalar, mineraller ve kimyasallar gibi doğal nesneleri içerir. Soyut yapılar bilgisayar bilimlerindeki veri yapılarını ve müzik formunu içerir. Yapı türleri arasında bir hiyerarşi, çoktan çoğa bağlantılar içeren bir bağlantı veya uzayda komşu olan bileşenler arasındaki bağlantıları içeren bir kafes bulunur.

Uzay, nesnelerin ve olayların göreceli konuma ve yöne sahip olduğu sınırsız üç boyutlu bir boyuttur. Modern fizikçiler genellikle zamanla, uzay-zaman olarak bilinen sınırsız dört boyutlu bir sürekliliğin parçası olduğunu düşünmesine rağmen, fiziksel alan genellikle üç doğrusal boyutta düşünülür. Mekan kavramının fiziksel evrenin anlaşılması için temel öneme sahip olduğu düşünülmektedir. Bununla birlikte, filozoflar arasında kendisinin bir varlık mı, varlıklar arasındaki ilişkinin mi yoksa kavramsal çerçevenin bir parçası mı olduğu konusunda anlaşmazlık devam eder.
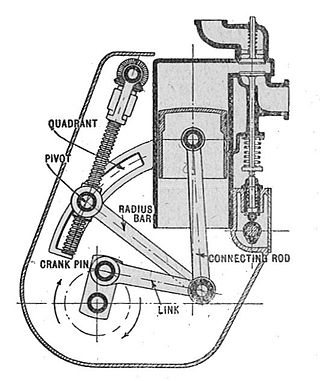
Bağlantı, kuvvetleri ve hareketi yönetmek için bağlanan bir mekanik gövde grubudur. Bir cismin veya bağlantının hareketi, geometri kullanılarak incelenir, bu nedenle bağlantının katı olduğu kabul edilir. Bağlantılar arasındaki bağlantılar örneğin ideal hareket, saf dönüş veya kaymayı sağlayacak şekilde modellenir ve eklemler olarak adlandırılır. Katı bağlantılar ve ideal eklemlerden oluşan bir ağ olarak modellenen bir bağlantıya kinematik zincir denir.

Robot kol, insan kolu ile benzer işlevleri olan ve genellikle programlanabilir mekanik bir koldur. Kol, mekanizmanın toplamı veya karmaşık bir robotun parçası olabilir. Böyle bir manipülatörün bağlantıları dönme hareketine veya doğrusal yer değiştirmeyi sağlayan eklemlerle bağlanır. Manipülatör bağlantıları kinematik bir zincir oluşturur. Manipülatörün kinematik zincirinin ucuna son efektör denir ve insan eline benzer.



