Perseverance (keşif aracı)
| Perseverance | |
|---|---|
| Mars 2020 görevinin bir parçası | |
 Perseverance'ın Eylül 2021'de, Mars 2020 görevinin ilk çekirdek örneklerinin bulunduğu bir kaya olan Rochette'de çektiği otoportre fotoğrafı. | |
| Tip | Mars keşif aracı |
| Sahibi | NASA |
| Üretici | Jet İtki Laboratuvarı |
| Özellikler | |
| Boyutlar | 2,9 m × 2,7 m × 2,2 m (9 ft 6 in × 8 ft 10 in × 7 ft 3 in) |
| Boş ağırlık | 1.025 kilogram (2.260 lb) |
| İletişim | |
| Güç | MMRTG; 110 watt |
| Roket | Atlas V 541 |
| Cihazlar | |
| |
| Tarihçe | |
| Fırlatma |
|
| Konuşlanma |
|
| Konum | 18°26′49″N 77°24′07″E / 18.447°K 77.402°D Jezero krateri, Mars |
| Kat edilen mesafe | 27,81 km (17,28 mi) (13 Ağustos 2024 itibarıyla)[2] |
| NASA Mars keşif araçları | |
Perseverance (lakabı Percy[3]), NASA'nın Mars 2020 görevinin bir parçası olarak Mars'taki Jezero kraterini keşfetmek amacıyla tasarlanmış bir Mars keşif aracıdır. Yaklaşık bir otomobil büyüklüğündedir. Jet İtki Laboratuvarı tarafından üretilmiştir ve 30 Temmuz 2020 11:50 UTC'de fırlatılmıştır.[1] Keşif aracının Mars'a başarıyla indiğine dair onay 18 Şubat 2021 20:55 UTC'de alındı.[4][5] Perseverance, 21 Ekim 2024 itibarıyla, inişinden bu yana 1305 sol (1.341 Dünya günü veya 3 yıl, 8 ay, 2 gün) boyunca Mars'ta aktif durumdadır. Keşif aracının varışının ardından NASA, iniş bölgesini Octavia E. Butler İniş Alanı olarak adlandırdı.[6][7]
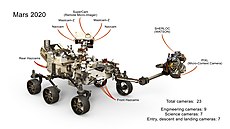
Perseverance, önceki keşif aracı Curiosity'yle benzer bir tasarıma sahip, fakat orta düzeyde daha fazla geliştirilmiştir. Yedi birincil faydalı yük cihazı, on dokuz kamera ve iki mikrofon taşımaktadır.[8]
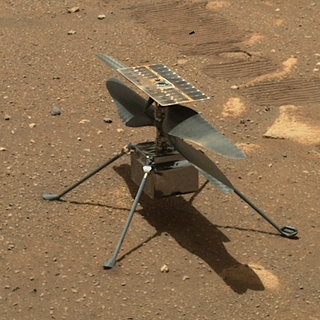
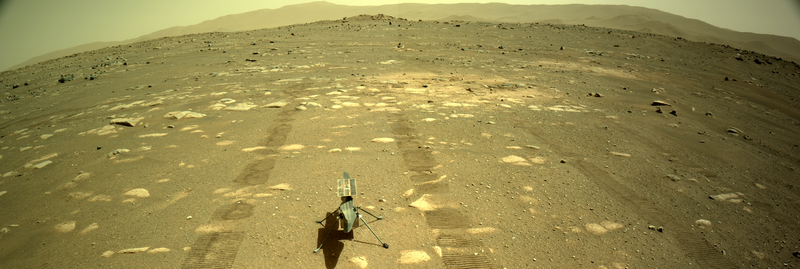
Keşif aracı aynı zamanda 19 Nisan 2021'de başka bir gezegende ilk motorlu hava aracı uçuşunu gerçekleştiren deneysel bir teknoloji test platformu olan mini helikopter Ingenuity'yi Mars'a taşıdı.[9] 18 Ocak 2024'te (UTC) 72. ve son uçuşunu gerçekleştiren helikopterin bir veya daha fazla rotor kanadında meydana gelen hasar, NASA'nın helikopteri hizmet dışı bırakmasına neden oldu.[10]
Keşif aracının hedefleri arasında yaşamı destekleyebilecek çok yaşlı Mars ortamlarını belirlemek, bu ortamlarda var olan eski mikrobiyal yaşamın kanıtlarını aramak, Mars yüzeyinde depolamak için kaya ve toprak örnekleri toplamak ve gelecekteki mürettebatlı görevlere hazırlık amacıyla Mars atmosferinden oksijen üretimini test etmek yer alıyor.[11]
Görev
Görev, Mars'ta geçmişte yaşanabilir şartların olup olmadığını, biyolojik izleri ve geçmiş mikrobik yaşamı araştıracaktır. Araç, 2020'de Atlas V-541 üzerinde fırlatılmak için planlanmıştır ve görevi Jet Propulsion Laboratory yönetecektir.[12] NASA Bilim Ekibi, aracın dünyaya geri getirilmek üzere 31 tane taş ve yüzey örneği almasını önermiştir. 2015'te bu konsept çok daha fazla örnek alınacak şekilde geliştirilmiştir. Alınan örnekler Mars yüzeyinde belli yerlere tüpler içinde bırakılacaktır.[13] Eylül 2013'te NASA, araştırmacıların ve bilim adamlarının gereken cihazları geliştirmesi için sağlayacağı desteği duyurdu.[14][15] Cihazlar Temmuz 2014'te açık rekabetten sonra seçildi.[16][17] Araç tarafından yürütülecek araştırma, toplanan örneklerin analizi için gerekli olan bilgiyi sağlayacaktır. Bilim Ekibi başkanı, NASA'nın Mars üzerinde daha önce asla hayat olmadığı varsayımındadır, ancak Curiosity'nin bulguları bunun mümkün olabileceğini göstermiştir.[18]
Hedefler
Mars 2020 keşif aracı Mars'ta daha önce yaşama elverişli olmuş olabilecek bir bölgeyi araştıracaktır. Geçmiş yaşam için izler arayacak, yaşam içerme ihtimali en yüksek örnekleri de sonradan incelenmesi için saklayacaktır. Mars'ın insanlar tarafından keşfi için gerekli olan teknolojiyi de test edecektir. Görevin en büyük hedeflerinden bir tanesi NASA'nın uzun dönemli örnek toplama projesi ve insanlı görevler için araştırmadır.[19][20] Araç, Mars'taki toz fırtınalarının tehlikelerini araştıracak ve Mars yüzeyinde atmosferdeki karbondioksitten () saf oksijen() üretimi için testleri yapacaktır.[21] 2014 İlkbaharında Bilim Ekibinin yardımıyla belirlenen hedefler, aracın taşıyacağı bilimsel cihazları da netleştirdi. Araç aynı zamanda yeraltı sularını, hava durumunu ve iklimi araştıracak, iniş tekniklerini ve teknolojilerini test edecek, Mars üzerinde insanlar için tehlike veya kolaylık yaratabilecek başka çevresel faktörleri de tespit edecektir.[22]


Tasarım

Perseverance tasarımı, öncülü olan Curiosity gezgin'inden evrildi. İki gezgin de benzer bir gövde planına, iniş sistemine, seyir aşamasına ve güç sistemine sahip, ancak tasarım Perseverance için çeşitli şekillerde geliştirildi. Mühendisler, gezgin tekerleklerini, bir miktar hasar görmüş Curiosity ‘nin tekerleklerinden daha sağlam olacak şekilde tasarladı.[23]
Perseverance, Curiosity 'nin 50 santimetre (20 in) tekerleklerinden daha kalın, daha dayanıklı, daha az genişliğe ve daha büyük çapa 525 santimetre (207 in) sahip alüminyum tekerleklere sahiptir.[24][25] Alüminyum tekerlekler, çekiş için takozlarla ve yaylı destek için kavisli titanyum tellerle kaplıdır.[26] Gezgin için ısı kalkanı, 2.400 °F (1.320 °C) kadar ısıya dayanabilmesini sağlamak için fenolik emdirilmiş karbon ablatöründen (PICA) yapılmıştır.[27] Curiosity gibi, gezginin de bir robot kolu vardır, ancak Perseverance 'ın kolu daha uzun ve daha güçlüdür ve 21 metre (69 ft) uzunluğundadır. Kol’un, Mars yüzeyinden jeolojik örnekleri steril saklama tüplerinde depolamak için ayrıntılı bir kaya delme ve örnekleme mekanizması vardır.[28] Ayrıca, tebeşir büyüklüğündeki örnekleri depolamaya yardımcı olan gezicinin altında gizli bir ikincil kol da vardır. Bu kol, Örnek İşleme Tertibatı (SHA) olarak bilinir ve toprak örneklerini gezicinin alt tarafındaki Uyarlanabilir Önbelleğe Alma Tertibatı (ACA) içindeki çeşitli istasyonlara taşımaktan sorumludur. Bu istasyonlar arasında hacim değerlendirmesi (numunenin uzunluğunun ölçülmesi), görüntüleme, mühür dağıtımı ve hermetik mühür istasyonu bulunur.[29] SHA'nın çalışması gereken küçük alan ve mühürleme faaliyetleri sırasındaki yük gereksinimleri nedeniyle, Örnek Önbelleğe Alma Sistemi "şimdiye kadar inşa ettiğimiz, test ettiğimiz ve uzay uçuşu için hazırladığımız en karmaşık, en gelişmiş mekanizmadır."[30]

Daha büyük aletlerin, yeni örnekleme ve önbelleğe alma sisteminin ve geliştirilmiş tekerleklerin birleşimi, Perseverance 'ı Curiosity 'nin 899 kilogram (1.982 lb) ağırlığına kıyasla 1.025 kilogram (2.260 lb) ağırlığında daha ağır hale getirmiştir; bu da %14'lük bir artış anlamına gelir.[32]
Gezicinin çok görevli radyoizotop termoelektrik jeneratörü (MMRTG) 45 kilogram (99 lb) kütleye sahip ve güç kaynağı olarak 48 kilogram (106 lb) plütonyum-238 oksit kullanır. Yarı ömrü 87,7 yıl olan plütonyum-238'in radyoaktif bozunması, fırlatma sırasında yaklaşık 110 watt'lık elektriğe dönüştürülen ısıyı açığa çıkarır.[33] Güç kaynağı bozundukça bu zamanla azalacaktır.[33] MMRTG, gezicinin faaliyetlerine güç veren iki adet lityum iyon şarjlı pili doldurur ve periyodik olarak doldurulmalıdır. Güneş panellerinin aksine MMRTG, mühendislere gece, toz fırtınaları sırasında ve kış aylarında bile gezicinin aletlerini çalıştırmada önemli bir esneklik sağlar.[33]
Keşif aracının bilgisayarı, sağlamlaştırılmış bir PowerPC G3 mikroişlemcisine (PowerPC 750) dayanan BAE Systems RAD750 radyasyona dayanıklı tek kartlı bilgisayarı kullanır. Bilgisayar 128 megabayt uçucu DRAM içerir ve 133 MHz'de çalışır. Uçuş yazılımı VxWorks işletim sisteminde çalışır, C dilinde yazılmıştır ve ayrı bir kartta 4 gigabayt NAND uçucu olmayan belleğe erişebilir.[34]
Perseverance 'nın, telemetri için üç anteni vardır ve bunların hepsi halen Mars yörüngesindeki araçlar aracılığıyla iletilir. Birincil UHF anteni, keşif aracından saniyede iki megabitlik maksimum hızda veri gönderebilir.[35] İki daha yavaş X-bant anteni iletişim yedeği içindir.
Cihazlar

NASA, gezici enstrümantasyon için yaklaşık 60 teklifi[37][38] değerlendirdi. 31 Temmuz 2014'te NASA, gezginin yükü olacak yedi enstrümanı duyurdu:[39][40]
- Mars Oksijen ISRU Deneyi (MOXIE), Mars atmosferindeki karbondioksit'den (CO
2) az miktarda oksijen (O
2) üretmek için bir keşif teknolojisi araştırmasıdır. 20 Nisan 2021'de bir saatte 5,37 gram oksijen üretildi ve aleti daha fazla araştırmak için iki Dünya yılı boyunca dokuz ekstraksiyon daha planlandı.[41] Bu teknoloji gelecekte insan yaşamını desteklemek veya dönüş görevlerinde roket yakıtı üretmek için kullanılabilir.[42][43] - X-Işını Litokimyası için Gezegensel Cihaz (PIXL), Mars yüzey malzemelerinin ince ölçekli element bileşimini belirlemek için bir X ışını floresansı spektrometresi'dir.[44][45][46]
- Mars'ın yeraltı deneyi için Radar Görüntüleyici (RIMFAX), farklı zemin yoğunluklarını, yapısal katmanları, gömülü kayaları, meteorları görüntülemek ve 10 metre (33 ft) derinlikte yeraltı su buzunu ve tuzlu suyu tespit etmek için bir yeraltı radarı RIMFAX, Norveç Savunma Araştırma Kuruluşu (FFI) tarafından sağlanmaktadır.[47][48][49][50]
- Mars Çevresel Dinamikler Analizörü (MEDA), sıcaklığı, rüzgar hızını ve yönünü, basıncı, bağıl nemi, radyasyonu ve toz parçacık boyutunu ve şeklini ölçen bir sensör setidir. İspanya'nın Astrobiyoloji Merkezi tarafından sağlanmaktadır.[51]
- SuperCam, kayalarda ve regolitlerde uzaktan görüntüleme, kimyasal bileşim analizi ve mineraloji sağlayabilen bir araç takımıdır. Curiosity gezginindeki ChemCam'in yükseltilmiş bir versiyonudur ancak iki lazer ve dört spektrometre ile biyolojik imzaları uzaktan tanımlamasına ve geçmişteki yaşanabilirliği değerlendirmesine olanak tanır. SuperCam, AEGIS hedefleme sistemiyle birlikte kullanılır. Los Alamos Ulusal Laboratuvarı, Fransa'daki Astrofizik ve Planetoloji Araştırma Enstitüsü (IRAP), Fransız Uzay Ajansı (CNES), Hawaii Üniversitesi ve İspanya'daki Valladolid Üniversitesi, SuperCam'in geliştirilmesi ve üretiminde işbirliği yaptı.[52][53]
- Yakınlaştırma yeteneğine sahip bir stereoskopik görüntüleme sistemi olan Mastcam-Z.[54][55] NASA photogallery'de yayımlanan NASA fotoğraf galerisine birçok fotoğraf dahil edildi. (Raw dahil)
- Organik ve Kimyasallar için Raman ve Lüminesans ile Yaşanabilir Ortamların Taranması (SHERLOC), ince ölçekli görüntüleme ve ultraviyole (UV) lazer kullanarak ince ölçekli mineralojiyi belirleyen ve organik bileşikleri tespit eden bir ultraviyole Raman spektroskopisidir.[56][57]
İniş,[58] sürüş ve örnek toplama sırasında mühendislik desteği için kullanılacak ek kameralar ve iki ses mikrofonu (Mars'ta çalışan ilk mikrofonlardır) vardır.[59][60]
Perseverance'ın bileşenlerine tam bir bakış için Learn About the Rover'a bakınız.


Fotoğraf Galerisi


Kaynakça
- ^ a b "Launch Windows". mars.nasa.gov. NASA. 31 Temmuz 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 28 Temmuz 2020.
 Bu madde, bu kaynaktan alınan kamu malı olan bir metni içermektedir.
Bu madde, bu kaynaktan alınan kamu malı olan bir metni içermektedir. - ^ "Where is Perseverance?". Mars 2020 Mission Perseverance Rover. NASA. 12 Haziran 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 13 Ağustos 2024.
- ^ Landers, Rob (17 Şubat 2021). "It's landing day! What you need to know about Perseverance Rover's landing on Mars". Florida Today. 19 Şubat 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 19 Şubat 2021.
- ^ mars.nasa.gov. "Touchdown! NASA's Mars Perseverance Rover Safely Lands on Red Planet". NASA. 20 Şubat 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 18 Şubat 2021. Bu madde, bu kaynaktan alınan kamu malı olan bir metni içermektedir.
- ^ Overbye, Dennis (19 Şubat 2021). "Perseverance's Pictures From Mars Show NASA Rover's New Home – Scientists working on the mission are eagerly scrutinizing the first images sent back to Earth by the robotic explorer". The New York Times. 19 Şubat 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 19 Şubat 2021.
- ^ Staff (5 Mart 2021). "Welcome to 'Octavia E. Butler Landing'". NASA. 5 Mart 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Mart 2021.
- ^ NASA's Perseverance Drives on Mars' Terrain for First Time 6 Mart 2021 tarihinde Wayback Machine sitesinde arşivlendi. NASA, 5 Mart 2021.
- ^ "Mars Perseverance Landing Press Kit" (PDF). Jet Propulsion Laboratory. NASA. 18 Şubat 2021 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 17 Şubat 2021. Bu madde, bu kaynaktan alınan kamu malı olan bir metni içermektedir.
- ^ Chang, Kenneth (19 Nisan 2021). "NASA's Mars Helicopter Achieves First Flight on Another World – The experimental Ingenuity vehicle completed the short but historic up-and-down flight on Monday morning". The New York Times. 28 Aralık 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 19 Nisan 2021.
- ^ "After Three Years on Mars, NASA's Ingenuity Helicopter Mission Ends". Jet Propulsion Laboratory. 25 Ocak 2024 tarihinde kaynağından arşivlendi. Erişim tarihi: 30 Ocak 2024.
- ^ "Overview". mars.nasa.gov. NASA. 8 Haziran 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Ekim 2020. Bu madde, bu kaynaktan alınan kamu malı olan bir metni içermektedir.
- ^ Harwood, William (4 Aralık 2012). "NASA announces plans for new $1.5 billion Mars rover". CNET. Erişim tarihi: 5 Aralık 2012.
Using spare parts and mission plans developed for NASA's Curiosity Mars rover, the space agency says it can build and launch the rover in 2020 and stay within current budget guidelines.
- ^ Davis, Jason (28 Ağustos 2017). "NASA considers kicking Mars sample return into high gear". The Planetary Society. 31 Ağustos 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 9 Mayıs 2020.
- ^ "Announcement of Opportunity: Mars 2020 Investigations". NASA. 24 Eylül 2013. 5 Ocak 2009 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 18 Mayıs 2014.
- ^ "Mars 2020 Mission: Instruments". NASA. 2013. 21 Mayıs 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 18 Mayıs 2014.
- ^ Brown, Dwayne (31 Temmuz 2014). "RELEASE 14-208 – NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before". NASA. 1 Nisan 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2014.
- ^ "Objectives – 2020 Mission Plans". mars.nasa.gov. 2 Aralık 2015 tarihinde kaynağından arşivlendi. Erişim tarihi: 4 Aralık 2015.
- ^ "Science Team Outlines Goals for NASA's 2020 Mars Rover". Jet Propulsion Laboratory. NASA. 9 Temmuz 2013. 10 Temmuz 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 10 Temmuz 2013.
- ^ Schulte, Mitch (20 Aralık 2012). "Call for Letters of Application for Membership on the Science Definition Team for the 2020 Mars Science Rover" (PDF). NASA. NNH13ZDA003L.[]
- ^ "Summary of the Final Report" (PDF). NASA / Mars Program Planning Group. 25 Eylül 2012. 3 Ağustos 2020 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 9 Mayıs 2020.
- ^ Klotz, Irene (21 Kasım 2013). "Mars 2020 Rover To Include Test Device To Tap Planet's Atmosphere for Oxygen". SpaceNews. Erişim tarihi: 22 Kasım 2013.[]
- ^ "Mars 2020 Rover - Overview". NASA/JPL. 8 Haziran 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Temmuz 2018.
- ^ Lakdawalla, Emily (19 Ağustos 2014). "Curiosity wheel damage: The problem and solutions". planetary.org. The Planetary Society. 26 Mayıs 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 22 Ağustos 2014.
- ^ Wehner, Mike (7 Nisan 2020). "NASA's Perseverance rover got some sweet new wheels". BGR. 27 Şubat 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 27 Şubat 2021.
- ^ "Mars 2020 – Body: New Wheels for Mars 2020". NASA/JPL. 26 Temmuz 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Temmuz 2018.
- ^ "Mars 2020 Rover – Wheels". NASA. 29 Haziran 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 9 Temmuz 2018.
- ^ Meyer, Mal (19 Şubat 2021). "Biddeford company creates critical part for Mars rover 'Perseverance' to land safely". WGME. 22 Nisan 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 22 Nisan 2021.
- ^ "Mars 2020 Rover's 7-Foot-Long Robotic Arm Installed". mars.nasa.gov. 28 Haziran 2019. 5 Aralık 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 1 Temmuz 2019.
The main arm includes five electrical motors and five joints (known as the shoulder azimuth joint, shoulder elevation joint, elbow joint, wrist joint and turret joint). Measuring 7 fit (2,1 metre) long, the arm will allow the rover to work as a human geologist would: by holding and using science tools with its turret, which is essentially its hand.
- ^ "Inside Perseverance: How Maxar Robotics Will Enable a Historic Mars…". 1 Kasım 2023 tarihinde kaynağından arşivlendi. Erişim tarihi: 20 Haziran 2024.
- ^ "The Extraordinary Sample-Gathering System of NASA's Perseverance Mars". 2 Haziran 2020. 13 Mart 2023 tarihinde kaynağından arşivlendi. Erişim tarihi: 20 Haziran 2024.
- ^ Staff (2021). "Messages on Mars Perseverance Rover". NASA. 2 Mart 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 7 Mart 2021.
- ^ "NASAfacts: Mars 2020/Perseverance" (PDF). 26 Temmuz 2020. 26 Temmuz 2020 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 13 Ağustos 2020.
- ^ a b c "Mars 2020 Rover Tech Specs". JPL/NASA. 26 Temmuz 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Temmuz 2018.
- ^ "Prototyping an Onboard Scheduler for the Mars 2020 Rover" (PDF). NASA. 18 Şubat 2021 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 30 Temmuz 2020.
- ^ "Communications". NASA. 28 Ocak 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 2 Şubat 2021.
- ^ "Sounds of Perseverance Mars Rover Driving – Sol 16 (16 minutes)". nasa.gov. National Aeronautics and Space Administration. 20 Mart 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 1 Ekim 2021.
- ^ Webster, Guy; Brown, Dwayne (21 Ocak 2014). "NASA Receives Mars 2020 Rover Instrument Proposals for Evaluation". NASA. 12 Kasım 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 21 Ocak 2014.
- ^ Timmer, John (31 Temmuz 2014). "NASA announces the instruments for the next Mars rover". Ars Technica. 20 Ocak 2015 tarihinde kaynağından arşivlendi. Erişim tarihi: 7 Mart 2015.
- ^ https://web.archive.org/web/20190401132556/https://www.nasa.gov/press/2014/july/nasa-announces-mars-2020-rover-payload-to-explore-the-red-planet-as-never-before/, Dwayne (31 Temmuz 2014). "Release 14-208 – NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before". NASA. 1 Nisan 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2014.
- ^ Brown, Dwayne (31 Temmuz 2014). "NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before". NASA. 5 Mart 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2014.
- ^ Potter, Sean (21 Nisan 2021). "NASA's Perseverance Mars Rover Extracts First Oxygen from Red Planet". NASA. 22 Nisan 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 22 Nisan 2021.
- ^ Jet Propulsion Laboratory (JPL). "Mars Oxygen In-Situ Resource Utilization Experiment (MOXIE)". techport.nasa.gov. NASA. 17 Ekim 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 28 Aralık 2019.
- ^ Hecht, M.; Hoffman, J.; Rapp, D.; McClean, J.; SooHoo, J.; Schaefer, R.; Aboobaker, A.; Mellstrom, J.; Hartvigsen, J.; Meyen, F.; Hinterman, E. (2021). "Mars Oxygen ISRU Experiment (MOXIE)". Space Science Reviews (İngilizce). 217 (1). s. 9. Bibcode:2021SSRv..217....9H. doi:10.1007/s11214-020-00782-8. hdl:1721.1/131816.2. ISSN 0038-6308. 11 Mart 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 9 Mart 2021.
- ^ Webster, Guy (31 Temmuz 2014). "Mars 2020 Rover's PIXL to Focus X-Rays on Tiny Targets". NASA. 22 Haziran 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2014.
- ^ "Adaptive sampling for rover x-ray lithochemistry" (PDF). David Ray Thompson. 8 Ağustos 2014 tarihinde kaynağından (PDF) arşivlendi.
- ^ Allwood, Abigail C.; Wade, Lawrence A.; Foote, Marc C.; Elam, William Timothy; Hurowitz, Joel A.; Battel, Steven; Dawson, Douglas E.; Denise, Robert W.; Ek, Eric M.; Gilbert, Martin S.; King, Matthew E. (2020). "PIXL: Planetary Instrument for X-Ray Lithochemistry". Space Science Reviews (İngilizce). 216 (8). s. 134. Bibcode:2020SSRv..216..134A. doi:10.1007/s11214-020-00767-7. ISSN 0038-6308. 27 Şubat 2021 tarihinde kaynağından arşivlendi. Erişim tarihi: 9 Mart 2021.
- ^ "RIMFAX, The Radar Imager for Mars' Subsurface Experiment". NASA. Temmuz 2016. 22 Aralık 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 19 Temmuz 2016.
- ^ Chung, Emily (19 Ağustos 2014). "Mars 2020 rover's RIMFAX radar will 'see' deep underground". cbc.ca. Canadian Broadcasting Corp. 25 Eylül 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 19 Ağustos 2014.
- ^ "University of Toronto scientist to play key role on Mars 2020 Rover Mission". 6 Ağustos 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 14 Mart 2020.
- ^ Hamran, Svein-Erik; Paige, David A.; Amundsen, Hans E. F.; Berger, Tor; Brovoll, Sverre; Carter, Lynn; Damsgård, Leif; Dypvik, Henning; Eide, Jo; Eide, Sigurd; Ghent, Rebecca (2020). "Radar Imager for Mars' Subsurface Experiment – RIMFAX". Space Science Reviews (İngilizce). 216 (8). s. 128. Bibcode:2020SSRv..216..128H. doi:10.1007/s11214-020-00740-4. hdl:10852/81406. ISSN 0038-6308.
- ^ "In-Situ Resource Utilization (ISRU)". 2 Nisan 2015 tarihinde kaynağından arşivlendi.
- ^ "NASA Administrator Signs Agreements to Advance Agency's Journey to Mars". NASA. 16 Haziran 2015. 8 Kasım 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 14 Mart 2020.
- ^ Manrique, J. A.; Lopez-Reyes, G.; Cousin, A.; Rull, F.; Maurice, S.; Wiens, R. C.; Madsen, M. B.; Madariaga, J. M.; Gasnault, O.; Aramendia, J.; Arana, G. (2020). "SuperCam Calibration Targets: Design and Development". Space Science Reviews (İngilizce). 216 (8). s. 138. Bibcode:2020SSRv..216..138M. doi:10.1007/s11214-020-00764-w. ISSN 0038-6308. PMC 7691312 $2. PMID 33281235.
- ^ Kinch, K. M.; Madsen, M. B.; Bell, J. F.; Maki, J. N.; Bailey, Z. J.; Hayes, A. G.; Jensen, O. B.; Merusi, M.; Bernt, M. H.; Sørensen, A. N.; Hilverda, M. (2020). "Radiometric Calibration Targets for the Mastcam-Z Camera on the Mars 2020 Rover Mission". Space Science Reviews (İngilizce). 216 (8). s. 141. Bibcode:2020SSRv..216..141K. doi:10.1007/s11214-020-00774-8. hdl:10261/234124. ISSN 0038-6308.
- ^ Bell, J. F.; Maki, J. N.; Mehall, G. L.; Ravine, M. A.; Caplinger, M. A.; Bailey, Z. J.; Brylow, S.; Schaffner, J. A.; Kinch, K. M.; Madsen, M. B.; Winhold, A. (2021). "The Mars 2020 Perseverance Rover Mast Camera Zoom (Mastcam-Z) Multispectral, Stereoscopic Imaging Investigation". Space Science Reviews (İngilizce). 217 (1). s. 24. Bibcode:2021SSRv..217...24B. doi:10.1007/s11214-020-00755-x. ISSN 0038-6308. PMC 7883548 $2. PMID 33612866.
- ^ Webster, Guy (31 Temmuz 2014). "SHERLOC to Micro-Map Mars Minerals and Carbon Rings". NASA. 26 Haziran 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 31 Temmuz 2014.
- ^ "SHERLOC: Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals, an Investigation for 2020" (PDF). 28 Eylül 2020 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 14 Mart 2020.
- ^ "Microphones on Mars 2020". NASA. 29 Mart 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 3 Aralık 2019.
- ^ Strickland, Ashley (15 Temmuz 2016). "New Mars 2020 rover will be able to "hear" the Red Planet". cnn.com. CNN News. 16 Ekim 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 14 Mart 2020.
- ^ Maki, J. N.; Gruel, D.; McKinney, C.; Ravine, M. A.; Morales, M.; Lee, D.; Willson, R.; Copley-Woods, D.; Valvo, M.; Goodsall, T.; McGuire, J. (2020). "The Mars 2020 Engineering Cameras and Microphone on the Perseverance Rover: A Next-Generation Imaging System for Mars Exploration". Space Science Reviews (İngilizce). 216 (8). s. 137. Bibcode:2020SSRv..216..137M. doi:10.1007/s11214-020-00765-9. ISSN 0038-6308. PMC 7686239 $2. PMID 33268910.
Dış bağlantılar
- NASA sitesi üzerinde Mars 20204 Haziran 2020 tarihinde Wayback Machine sitesinde arşivlendi.
Mars uzay aracı görevleri | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktif |
|    | |||||||||
| Geçmiş |
| ||||||||||
| |||||||||||
| Gelecek |
| ||||||||||
| Araştırmalar |
| ||||||||||