Mars Bilim Laboratuvarı
 MSL seyir yapılandırması | |
| Görev türü | Mars Keşif aracı |
|---|---|
| Uygulayıcı | NASA |
| COSPAR kimliği | 2011-070A |
| SATCAT no. | 37936 |
| Web sitesi | http://mars.jpl.nasa.gov/msl/ |
| Görev süresi | Ön görev: 669 Mars sol (687 gün) İnişten bu yana: 4334 Mars sol 12 yıl, 2 ay, 9 gün |
| Uzay aracı özellikleri | |
| Üretici | JPL |
| Fırlatma ağırlığı | 3.839 kg (8.463 lb)[1] |
| Görev başlangıcı | |
| Fırlatma tarihi | 26 Kasım 2011, 15.02:00.211 UTC[2][3][4] |
| Roket | Atlas V 541 (AV-028) |
| Fırlatma yeri | Cape Canaveral SLC-41[5] |
| Üstlenici | United Launch Alliance |
| Mars keşif aracı | |
| İniş tarihi | 6 Ağustos 2012, 05.17 UTC (12 yıl, 2 ay ve 9 gün önce) |
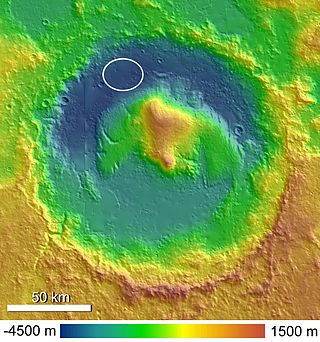
| İniş yeri | Gale krateri'nde Bradbury iniş alanı 4°35′22″S 137°26′30″E / 4.5895°G 137.4417°D[6][7] |
| Sürüş mesafesi | (24 Şubat 2024 itibarıyla) Mars'ta 31,43 km (19,53 mi)[8] |
Flagship | |
Mars Bilim Laboratuvarı (İng. Mars Science Laboratory, kısaca MSL), NASA'nın Curiosity isimli keşif robotunu Mars'a indirmek amacıyla fırlatılan robotik uzay sondası görevi.[9] 26 Kasım 2011'de fırlatılan robot Mars'ta Sharp dağı yakınındaki Gale kraterine 6 Ağustos 2012 tarihinde iniş yapmıştır.[10] Robot Mars'a daha önceki denemelerden farklı bir şekilde iniş yaptı ve Mars'ın yüzeyini incelemeye başladı.

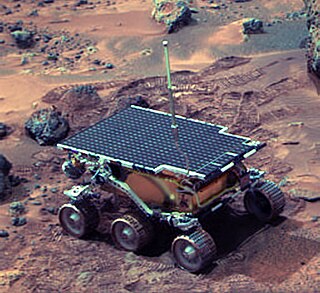
Curiosity, Mars'a daha önce gönderilen Spirit ve Opportunity robotlarından beş kat daha büyük ve on kat daha fazla bilimsel ekipman taşıyabiliyor. Atlas V 541 roketi ile fırlatıldı ve Mars'a indikten sonra 5–20 km alanda en az 687 dünya günü (1 Mars yılı) keşif yapacak.
Mars Bilim Laboratuvarı Mars'ın uzun bir süre robotlarla incelenmesi için başlatılan Mars keşif programının bir parçası. Proje daha sonra Jet Propulsion Laboratory tarafından yönetilmeye başlandı. Mars Bilim Laboratuvarı projesinin bütçesi yaklaşık 2.5 milyar dolardır.
Tarihçe

Nisan 2004'te, NASA "Fırsat Anonsu" adı altında Mars Bilim Laboratuvarı'nda kullanılabilecek bilimsel ekipmanlarla ilgili bir duyuru yaptı. 2004'ün sonunda Aerojet bu laboratuvarı Mars yüzeyine gönderebilmek için yeni roket motorunun denemesini yaptı. Testte kullanılan roket motoru ilk olarak 1973 yılında Viking programında kullanılmak üzere tasarlanmıştı. JPL'ye teknoloji desteği verme amaçlı bu testler 2005'e kadar devam etti. Tek yakıt kaynaklı bu motorun en büyük özelliği itiş gücündeki artıştı. 14 Aralık 2004'te NASA aracın geliştirilmesi için sunulan sekiz teklifi seçip değerlendirmeye başladı.
Hedefler

MSL uzay yolculuğunun dört bilimsel hedefi vardır:[11]
- Mars'ın geçmişte hayatı destekleyen bir ortam olup olmadığını anlamak
- Mars iklimini incelemek
- Mars'ın yapısını incelemek
- İnsanlı bir uçuş için bilgi toplamak
Bu hedeflere ulaşmak için MSL'in altı ana bilimsel hedefler:[12][13]
- Mars yüzeyinin ve yüzeye yakın jeolojik malzemelerin mineralojik bileşimini tespit etmek,
- Hayatın yapı taşlarını keşfetmeye teşebbüs etmek,
- Kayaların ve toprağını oluşum ve değişim sürecini yorumlamak,
- Uzun süreli (milyarlarca yıl) Mars atmosferi oluşumunu anlamak,
- Su ve karbon dioksitin şimdiki durumu, dağılımı ve döngüsünü kavramak,
- Geniş spektrumlu yüzey radyasyonları galaktik kozmik radyasyon, kozmik radyasyon, Güneş proton olayı ve ikincil nötronlar dâhil anlamak.
Bu keşfin bir parçası olarak ilk defa bir uzay aracının içindeki radyasyon, Mars yolculuğuna başlar başlamaz ölçümeye başladı. Bu veriler bundan sonrası için plânlanan Mars yolculuklarına yarayacak.[14]
Özellikler
Uzay aracı
Uzay aracı uçuş sistemi, fırlatma sırasında Dünya-Mars yakıtlı seyir aşaması (539 kg), giriş-alçalış-iniş (EDL) sistemi (390 kg iniş sevk maddesi dahil, 2.401 kg) ve entegre bir alet paketine sahip 899 kg'lık bir mobil keşif aracından oluşan, toplamda 3.893 kg'lık bir ağırlığa sahipti.[15]
Keşif aracı

Curiosity adlı keşif aracının ağırlığı Mars'a inişe geçtiğinde sâdece 900 kg olup bunun 80 kg'ı bilimsel âletlerdir.[16]
- Boyutları: Keşif aracı 3 m uzunluğunda olup 1½ m uzunluğunda ve 6,8 kg bilimsel âletleriyle birlikte 174 kg ağırlığında olup Mars Exploration Roverlerden çok daha büyüktür.[16][17][18]
- Sürat: Yüzeye inince Curiosity, 75 cm yüksekliğine kadar olan engelleri aşabilecek yapıdadır. Erişebileceği en yüksek sürat, otomatik navigasyonda takrîben saatte 90 m'dir (25 cm/s); ortalama süratin güç seviyesi, arâzî zorluğu, kayma ve görüş uzaklığı gibi parametreleri de göz önünde bulundurarak saatte 30 m olması beklenmektedir. MBL'nın bir Mars yılı sürmesi plânlanan yolculuğu sırasında en az 19 km yol kat edeceği sanılıyor.[19]
- Güç kaynağı: Curiosity, enerji kaynağı olarak 1976'da başarılı olmuş Viking 1 ve Viking 2 Mars iniş araçları gibi bir adet radyoizotop termoelektrik üreteci (RTJ) kullanmaktadır.[20][21]
- Radyoizotop güç sistemleri (RGSleri), bozunmayan (İng. non-fissile) plutonyum 238'in tabii radyoaktif bozunumundan elektrik üreten jeneratörlerdir. İzotobun tabii bozunumdan ortaya çıkan ısı elektriğe dönüştürülerek bütün saat ve mevsimlerde sâbit güç sağlar. Artık ısı borular yardımıyla sistemleri ısıtmak için kullanılır. Bu şekilde elektrik güç ortaya çıkar ve aracın kendisi ve âletlerini çalıştırır.[20][21] Curiosity's RTG is fueled by 4.8 kg of plutonium-238 dioxide supplied by the U.S. Department of Energy,[22] packed in 32 pellets each about the size of a marshmallow.[16]
- Curiosity'nin güç jeneratörleri, Boeing'in ürettiği en yeni RTJlerdir ve "Çoklu-Yolculuk Radyoizotop Termoelektrik Jeneratör" veya kısaca ÇYRTJ (İng. Multi-Mission Radioisotope Thermoelectric Generator, MMRTG) adı verilmektedir.[23] Klâsik RTJ teknolojisine dayanan güç kaynağı, daha uyumlu ve kompakt teknolojik adımdır[23] ve yolculuğun başında 2000 watt termal enerji, yolculuk boyunca 125 watt elektrik güç üretebilecek yapıdadır.[20][21] ÇYRTJ, plutonyum yakıtı azaldıkça daha az güç üretir. 14 yıllık çalışma süresi sonunda ürettiği güç 100 watt'tır.[24][25] MBL, günde 2,5 kilowatt saatlık enerji üretir. Bu da günde 0,6 kWh üreten Mars Exploration Roverlerden çok daha fazladır.
- Isı red sistemi:' Curiositynin inişe geçebileceği muhtemel alanlarda sıcaklık -127 ilâ +30 *C arasında olabilir. Bu yüzden ısı red sistemi (IRS; İng. heat rejection system (HRS)), MBL'nın bünyesinde bulunan ve hassas sistemleri optimal sıcaklıkta tutmaya yarayan, 60 m uzunluğunda olup içinden sıvı pompalanan bir boru sistemine sâhiptir.[26] Dâhilî parçaları ısıtmak için kullanılan bir başka metot da aracın içinde diğer üniteler ve ÇYRTJ biriminden ortaya çıkan artık ısıyı kullanmaktır. IRS'nin bir başka özelliği de gerektiğinde üniteleri soğutmaktır.[26]
- Bilgisayarlar: "Rover Compute Element" (RCE) olarak adlandırılan iki özdeş yerleşik keşif aracı bilgisayarı mevcuttur. Bilgisayarların önemli bir kapanma sebebini önlemek için başka uzay araçlarında da olduğu gibi yapımında uzayın aşırı ışımasına dayanıklı bellek kullanılmıştır. Her bilgisayarın belleği 256 KB EEPROM, 256 MB DRAM ve 2 GB flash memory vardır.[27] 3 MB EEPROM, 128 MB DRAM ve 256 MB flash belleği olan Mars Exploration Rover'lerden daha güçlüdür.[28]
- KİB bilgisayarları, Mars Exploration Rover'lerin kullandığı RAD6000 merkezî işlem biriminin gelişmişi RAD750 MİB'yi (CPU) kullanmaktadır.[29][30] RAD750 MİB'si 400 milyon işlem/s'ye kadar hesaplayabilirken RAD6000 MİB'si ancak 35 MİPS'e erişir.[31][32] İki yerleşik bilgisayardan biri yedekte olup ana bilgisayar arızalandığında kontrolü devralır.[27]
- Atalet Ölçüm Birimi (IMU) ile sağlanan üç eksenli konum bilgisi, keşif aracının navigasyonunda kullanılır.[27] Keşif aracının bilgisayarları, dâhilî sıcaklığı ayarlamak gibi işlemlerle kendini devamlı denetleyerek aracın kullanılmaya hazır durumda kalmasını sağlar.[27] Resim çekmek, hareket etmek ve âletleri kullanmak gibi işlemler, uçuş ekibince ona yollanan bir komut dizisi şeklinde uygulamaya konur.[27]
- Haberleşme:' Curiositynin iki haberleşme imkânı vardır: Dünya ile doğrudan haberleşebilen bir X bandı verici-alıcısı ve Mars etrafında dönen uzay araçlarıyla (orbiter) haberleşmek için Mars UHF Electra-Lite software-tanımlı radyo. Yörüngedeki uzay araçlarıyla haberleşme, yörünge araçlarının daha güçlü ve büyük antenlerinden dolayı keşif aracının muhtemel ana haberleşme yolu olarak görülmektedir.[33]
- İnişe geçerken telemetri Mars Odyssey, Mars Reconnaissance Orbiter ve ESA'nın Mars Express uydularınca izlenecek. Odyssey, UHF frekanslarında Dünya'ya gerçek zamanlı telemetri yapabilecek kapasitededir ve bu yayın 13.46 dakika sürer.[34][35]
- Hareketlilik sistemleri: (İngilizce: mobility systems) Önceki keşif araçlarında olduğu gibi (Mars Exploration Rover’leri, Mars Pathfinder) Curiosity’nin altı tekerleği, bir kamyon-askı sistemiyle araca bağlanmıştır. Diğer keşif araçlarının hilâfına amortisör sistemi, bu sefer inişe geçme takımı olarak da kullanıldı.[36] Curiosity'nin tekerlerleri, önceden Mars’a inen iki robot çeşitinden önemli ölçüde daha büyüktür. Her tekerleğin sırtı (profili) trıksiyonu sağlayacak şekildedir. Ancak Mars’ın kumla yüzeyinde izler bırakırlar. Bu izler, keşif aracının kameraları tarafından gidilmiş yolun uzunluğunu tahmin etmede kullanılır. İz, "JPL" için Mors kodudur (•--- •--• •-••).[37]
Modüller
Seyir Aşaması Modülü
Dört metre çapında 400 kg ağırlığındaki bu modül, Mars Bilim Laboratuvarı'nın Dünya'dan Mars'a uçuşu sırasında yönetilmesi sağlanıyor. Seyir aşaması modülünde ayrıca iletişim ve sıcaklık ayarlayıcı ve sürücüler var. MSL'in Mars atmosferi'ne girişi sırasında Merak'ı Mars'a taşıyacak diğer modüller ile iletişimin gerçekleştirilmesini sağlamak da bu modülün başlıca görevleri arasında. MSL'in uzaydaki seri sırasında tam olarak hangi konumda bulunduğunun tespit edilmesini sağlayar yılduz algılayıcı ve iki güneş algılayıcı bulunuyor.
Kapsül modülü
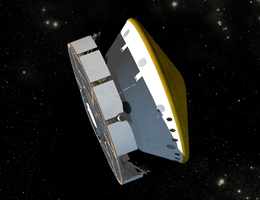
Lockheed Martin tarafından üretilen 731 kg'lik kapsül modülü Merak'ı İniş aşaması modülü ile Mars atmosfer'ine girerken olası tehlikelerden koruyacak. Mars'taki Gale kraterine inerken erişilecek olan yüksek hızı frenlemek için üst bölümünde paraşüt vardır. Paraşüt açıldığında 16 m çapına 50 m yüksekliğe erişecektir. Kapsülde seyir aşaması modülü gibi Mars atmosferine girdiği zaman küçük manevralar yapacak 8 adet küçük motor ve dengeleyici bulunuyor. Alt bölüm ise Isı kalkanı modülünden oluşuyor.
 Curiosity, 2010’da test edilip birleştirilmektedir.
Curiosity, 2010’da test edilip birleştirilmektedir.
Mayıs 2011’da Curiosity  Tekerleklerin sırt deseni, uzaklık tahmîninde kullanılmaktadır. Desen, MBL üzerinde çalışan merkezlerden biri olan "JPL" için Morse kodu niteliğindedir.
Tekerleklerin sırt deseni, uzaklık tahmîninde kullanılmaktadır. Desen, MBL üzerinde çalışan merkezlerden biri olan "JPL" için Morse kodu niteliğindedir. Küçük uzay verici-alıcısı (İngilizce: Small Deep Space Transponder)
Küçük uzay verici-alıcısı (İngilizce: Small Deep Space Transponder)
Videolar
Kaynakça
- ^ "Mars Science Laboratory Landing Press Kit" (PDF). NASA. Temmuz 2012. s. 6. 5 Ağustos 2012 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 5 Ağustos 2012.
- ^ Beutel, Allard (19 Kasım 2011). "NASA's Mars Science Laboratory Launch Rescheduled for November 26". NASA. 2 Nisan 2015 tarihinde kaynağından arşivlendi. Erişim tarihi: 21 Kasım 2011.
- ^ Greicius, Tony (20 Ocak 2015). "Mars Science Laboratory - Curiosity". 29 Mayıs 2009 tarihinde kaynağından arşivlendi.
- ^ Guy Webster. "Geometry Drives Selection Date for 2011 Mars Launch". NASA/JPL-Caltech. 24 Mayıs 2010 tarihinde kaynağından arşivlendi. Erişim tarihi: 22 Eylül 2011.
- ^ Martin, Paul K. "NASA'S Management of the Mars Science Laboratory Project (IG-11-019)" (PDF). NASA Office of the Inspector General. 26 Haziran 2011 tarihinde kaynağından (PDF) arşivlendi.
- ^ "Video from rover looks down on Mars during landing". MSNBC. 6 Ağustos 2012. 24 Eylül 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 7 Ekim 2012.
- ^ Young, Monica (7 Ağustos 2012). "Watch Curiosity Descend onto Mars". Sky & Telescope. 17 Şubat 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 7 Ekim 2012.
- ^ "Where Is Curiosity?". mars.nasa.gov. NASA. 7 Ekim 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 24 Şubat 2024.
 Bu madde, bu kaynaktan alınan kamu malı olan bir metni içermektedir.
Bu madde, bu kaynaktan alınan kamu malı olan bir metni içermektedir. - ^ "Arşivlenmiş kopya". 20 Şubat 2012 tarihinde kaynağından arşivlendi. Erişim tarihi: 29 Nisan 2012.
- ^ "Arşivlenmiş kopya". 7 Haziran 2012 tarihinde kaynağından arşivlendi. Erişim tarihi: 29 Nisan 2012.
- ^ "Arşivlenmiş kopya". 22 Şubat 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 29 Nisan 2012.
- ^ "Overview". JPL. NASA. 22 Şubat 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 27 Kasım 2011.
- ^ "Mars Science Laboratory Mission Profile". 21 Şubat 2011 tarihinde kaynağından arşivlendi. Erişim tarihi: 4 Ağustos 2012.
- ^ "NASA - Curiosity, The Stunt Double (2012)". 1 Ağustos 2012 tarihinde kaynağından arşivlendi. Erişim tarihi: 4 Ağustos 2012.
- ^ "Mars Science Laboratory Landing Press Kit" (PDF). NASA. Temmuz 2012. s. 6. 19 Ocak 2016 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 6 Ağustos 2012.
- ^ a b c Watson, Traci (14 Nisan 2008). "Troubles parallel ambitions in NASA Mars project". USA Today. 31 Temmuz 2009 tarihinde kaynağından arşivlendi. Erişim tarihi: 27 Mayıs 2009.
- ^ Mars Rovers: Pathfinder, MER (Spirit ve Opportunity), and MSL (video). Pasadena, California. 12 Nisan 2008. 26 Temmuz 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 22 Eylül 2011.
- ^ "MER Launch Press Kit" (PDF). 26 Temmuz 2004 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 6 Ağustos 2012.
- ^ "Mars Science Laboratory — Homepage". NASA. 6 Kasım 2015 tarihinde kaynağından arşivlendi. Erişim tarihi: 22 Eylül 2011.
- ^ a b c "Multi-Mission Radioisotope Thermoelectric Generator" (PDF). NASA/JPL. 1 Ocak 2008. 7 Kasım 2012 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 7 Eylül 2009.
- ^ a b c "Mars Exploration: Radioisotope Power and Heating for Mars Surface Exploration" (PDF). NASA/JPL. 18 Nisan 2006. 12 Ekim 2012 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 7 Eylül 2009.
- ^ "Mars Science Laboratory Launch Nuclear Safety" (PDF). NASA/JPL/DoE. 2 Mart 2011. 8 Kasım 2014 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 28 Kasım 2011.
- ^ a b "Technologies of Broad Benefit: Power". 14 Haziran 2008 tarihinde kaynağından arşivlendi. Erişim tarihi: 20 Eylül 2008.
- ^ "Mars Science Laboratory – Technologies of Broad Benefit: Power". NASA/JPL. 3 Şubat 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 23 Nisan 2011.
- ^ Ajay K. Misra (26 Haziran 2006). "Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power" (PDF). NASA/JPL. 9 Ağustos 2012 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 12 Mayıs 2009.
- ^ a b Susan Watanabe (9 Ağustos 2009). "Keeping it Cool (...or Warm!)". NASA/JPL. 21 Mayıs 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 19 Ocak 2011.
- ^ a b c d e "Mars Science Laboratory: Mission: Rover: Brains". NASA/JPL. 3 Şubat 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 27 Mart 2009.
- ^ Bajracharya, Max (Aralık 2008). "Autonomy for Mars rovers: past, present, and future". Computer. 41 (12). s. 45. doi:10.1109/MC.2008.9. ISSN 0018-9162.
- ^ "BAE Systems Computers to Manage Data Processing and Command For Upcoming Satellite Missions" (Basın açıklaması). BAE Systems. 17 Haziran 2008. 6 Eylül 2008 tarihinde kaynağından arşivlendi. Erişim tarihi: 17 Kasım 2008.
- ^ "E&ISNow — Media gets closer look at Manassas" (PDF). BAE Systems. 1 Ağustos 2008. 24 Şubat 2009 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 17 Kasım 2008.
- ^ "RAD750 radiation-hardened PowerPC microprocessor" (PDF). BAE Systems. 1 Temmuz 2008. 12 Mart 2011 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 7 Eylül 2009.
- ^ "RAD6000 Space Computers" (PDF). BAE Systems. 23 Haziran 2008. 4 Ekim 2009 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 7 Eylül 2009.
- ^ Andre Makovsky, Peter Ilott, Jim Taylor (2009). "Mars Science Laboratory Telecommunications System Design" (PDF). JPL. 28 Şubat 2013 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 6 Ağustos 2012.
- ^ "Mars Earth distance in light minutes, Wolfram Alpha". 13 Eylül 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Ağustos 2012.
- ^ "Relay sats provide ringside seat for Mars rover landing, William Harwood, CBS News". 20 Eylül 2012 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Ağustos 2012.
- ^ "Next Mars Rover Sports a Set of New Wheels". NASA/JPL. 5 Temmuz 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Ağustos 2012.
- ^ "New Mars Rover to Feature Morse Code". National Association for Amateur Radio. 3 Şubat 2016 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Ağustos 2012.
Mars uzay aracı görevleri | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Aktif |
|    | |||||||||
| Geçmiş |
| ||||||||||
| |||||||||||
| Gelecek |
| ||||||||||
| Araştırmalar |
| ||||||||||