Venüs, Güneş Sistemi'nde Güneş'e uzaklık bakımından ikinci sıradaki, sıcaklık bakımından ise birinci sıradaki gezegendir.

Apollo Projesi, NASA tarafından gerçekleştirilen insanlı Ay yolculuğu projesi. Gemini Projesi'nden sonraki proje olmakla birlikte Uzay Yarışı ve Soğuk Savaş, Apollo Projesi aşamasına gelinmesinde etkili olmuştur. Proje, Apollo uzay araçları ve Saturn V ile 1961 ile 1975 yılları arasına uygulandı. Apollo Projesi, adını Yunan tanrısı Apollon'dan almıştır.

Uzay aracı ya da uzay gemisi, Dünya'nın atmosferi dışında, özellikle dış uzayda çalışmak üzere tasarlanmış araç ya da makinedir. Uzay araçları insanlı ya da insansız olabilir. Bir uzay aracı telekomünikasyon, Dünya'nın gözlemlenmesi, meteoroloji, yolbul, uzay kolonizasyonu, gezegen keşfi, uzay turizmi, uzay savaşımı, uzay ortamında insan ve kargo taşınması gibi görevler için yapılmış olabilir. Bu tanım aynı zamanda yapay uyduları da kapsamaktadır.

Uzay sondası, Dünya'nın çekim alanından kurtulup, Ay'a, diğer gökcisimlerine, gezegenler arası ya da galaksiler arası uzay boşluğuna gönderilerek veri toplamaya yarayan robotik uzay aracı ve bu aracın yerine getirdiği göreve verilen addır. Halihazırda etkin durumda yaklaşık 20 uzay sondası görev yapmaktadır. Şu an uzayda sondası bulunan ülkeler ve birlikler, Rusya, Ukrayna, ABD, AB, Japonya, Hindistan ve Çin'dir.

Phoenix, NASA'nın denetimi altında Mars Keşif Programı çerçevesinde Mars'a gönderilen robotik bir uzay aracı. Programda görev alan bilim insanları, Mars üzerinde mikrobiyal yaşam olup olmadığını ve orada suyun geçmişini araştırmak için Phoenix'in iniş bölümünün üstünde yer alan cihazları kullanacaklardır. Çok ortaklı program, NASA'nın Roket İtiş Laboratuvarı yönetimi altında Arizona Üniversitesi'ndeki Ay ve Gezegenler Laboratuvarı bölümünün başkanlığında yürütülmekteydi. Program ABD, Kanada, İsviçre, Filipinler, Danimarka, Almanya ve İngiltere'den çeşitli üniversitelerin; NASA, Kanada Uzay Ajansı, Finlandiya Meteoroloji Enstitüsü, Lockheed Martin Space Systems ve diğer uzay şirketlerinin ortak çalışmasıdır. Bir devlet üniversitesi tarafından yönetilen ilk uzay uçuşudur.

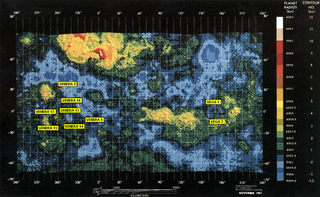
Viking 1, NASA'nın Viking Programı kapsamında Mars'a gönderdiği 2 görevden ilkidir. 20 Ağustos 1975'te başlayan yolculuk sonucunda, araç 19 Haziran 1976'da Mars yörüngesine oturtuldu. Yaklaşık 1 ay sonra, 20 Temmuz 1976'da Mars yüzeyine inerek, Mars yüzeyindeki ilk Amerikan nesnesi olmayı başardı. İlerleyen 6 yıl boyunca gönderdiği veriler ve fotoğraf Mars hakkında görüşlerin temelini oluşturdu ve bir sonraki NASA görevleri için yol göstericiydi.

Mars Bilim Laboratuvarı, NASA'nın Curiosity isimli keşif robotunu Mars'a indirmek amacıyla fırlatılan robotik uzay sondası görevi. 26 Kasım 2011'de fırlatılan robot Mars'ta Sharp dağı yakınındaki Gale kraterine 6 Ağustos 2012 tarihinde iniş yapmıştır. Robot Mars'a daha önceki denemelerden farklı bir şekilde iniş yaptı ve Mars'ın yüzeyini incelemeye başladı.
Viking 2 görevi, temelde Viking 1 göreviyle aynı olan ve bir yörünge aracı ile iniş aracından oluşan, Mars'ın hedeflendiği ABD Viking programının bir parçasıydı. Viking 2, Mars'ta 1281 sol süresince faaliyet gösterdi. Viking 2 iniş aracı yüzeyde 1316 gün veya 1281 sol boyunca çalıştı ve pilleri arızalandığında 12 Nisan 1980'de kapatıldı. Yörünge aracı, 25 Temmuz 1978'e kadar çalıştı ve Mars çevresindeki 706 yörüngede yaklaşık 16.000 görüntü gönderdi.
İnsansız uzay gemisi ya da insansız uzay aracı, otomatik olarak uzayda uçabilen ve insansız uzay uçuşları için kullanılan uzay gemilerine verilen genel addır. Ne derece insanlardan bağımsız, yani özerk olduğu gemi modelleri arasında farklıdır. Uzaktan kumandalı, uzaktan güdümlü ya da tamamen özerk (robotik) olabilirler. Mesela Salyut 7, Mir ve UUİ'nun modülü Zarya, insansız uzaktan güdümlü şeklide istasyonu işletebilme, her iki yeniden ikmâl aracı ve yeni modüllerle kenetlenme imkânına sâhipti. En yaygın insansız uzay gemileri robotik uzay gemileri, insansız yeniden ikmâl araçları, uzay sondaları ve uzay rasathaneleridir. Her insansız uzay gemisi robotik olmamaktadır. Meselâ uzaya yollanan bir yansıtıcı top, robotik değildir.

Yüksek Çözünürlüklü Görüntüleme Bilim Deneyi,, Mars Yörünge Kâşifi'nin bünyesinde bulunan yüksek çözünürlüklü bir kameradır. Arizona Üniversitesi'nin geliştirdiği bu kamera, 65 kg (143 lb) ağırlığında olup, yapımı yaklaşık 40 milyon dolara mal olmuştur. Derin uzay keşifi görevleri arasındaki en büyük diyafram açıklığına (aperture) sahip kamerası ile HiRISE, Mars yüzeyini 0.3m/piksel gibi bir detayla fotoğraflama yeteneğine sahiptir.
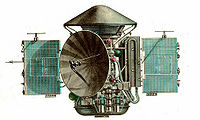
Venera serisi sondalar, Sovyetler Birliği tarafından 1961 ile 1984 arasında Rusça adı Venera olan Venüs'le ilgili bilgi edinmek üzere geliştirilmiştir. Sovyetlerin bazı diğer sondaları gibi, sonraki sürümler, ikincisi ilkinden biraz sonra fırlatılmak üzere, çifter çifter uzaya gönderilmiştir.

Mars Pathfinder 1997 yılında Mars yüzeyine üzerinde bir ana istasyonu ve keşif robotunu başarıyla indirmiş bir Amerikan uzay aracıdır. İniş takımları ile birlikte Carl Sagan Hatıra İstasyonu olarak anılan tekerlekli ve hafif (10.6 kg/23 lb) keşif aracının adı ise Sojourner'dir.

Mars Reconnaissance Orbiter (MRO), Mars'ın jeolojisini ve iklimini incelemek, gelecekteki iniş alanlarının keşfini sağlamak ve yüzey görevlerinden Dünya'ya veri aktarmak için tasarlanmış bir yörünge uzay aracıdır. 12 Ağustos 2005'te fırlatılan araç, 10 Mart 2006'da Mars'a ulaştı. Kasım 2006'da, beş aylık atmosfer direnciyle yavaşladıktan sonra bilimsel çalışmaların yapılacağı yörüngeye yerleşti ve esas bilimsel aşama başladı. 2010 yılında esas görevin sonuna kadar MRO'nun geliştirilmesi ve işletilmesinin maliyeti 716,6 milyon ABD dolarıydı.
Yörünge aracı, bir gezegen ya da diğer bir astronomik nesnenin yörüngesinde faaliyet gösteren bir uzay sondasıdır.

Mars keşif aracı, Mars yüzeyinde seyahat etmek üzere tasarlanmış uzaktan kumandalı bir motorlu araçtır. Gezginlerin sabit iniş araçlarına göre çeşitli avantajları vardır: daha fazla alanı incelerler, ilginç özelliklere yönlendirilebilirler, kış aylarını atlatmak için kendilerini güneşli konumlara yerleştirebilirler ve çok uzaktan robotik araç kontrolünün nasıl gerçekleştirileceği bilgisini geliştirebilirler. Mars Reconnaissance Orbiter gibi yörüngesel uzay araçlarından farklı bir amaca hizmet ederler. Daha yeni bir gelişme ise Mars helikopteridir.

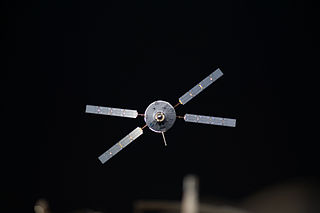
Nozomi, Uzay ve Astronomi Bilimleri Enstitüsü (ISAS) ile Tokyo Üniversitesi tarafından geliştirilen bir Japon uzay sondasıdır.
Venera 3, Venüs'ün yüzeyini keşfetmek için Sovyetler Birliği tarafından inşa edilen ve fırlatılan bir Venera programı uzay aracıdır. O 04:19 de 16 Kasım 1965 tarihinde başlatılan UTC gelen Baykonur, Kazakistan, SSCB. Sonda, Venüs atmosferine girmek ve yüzeye paraşütle girmek için tasarlanmış bir giriş sondası ve giriş sondasını Venüs'e taşıyan ve aynı zamanda giriş sondası için bir iletişim rölesi görevi gören bir taşıyıcı / uçuş uzay aracı içeriyordu.

ExoMars Trace Gas Orbiter, Avrupa liderliğindeki ExoMars programının bir parçası olarak 2016 yılında Mars'a atmosferik araştırma için bir yörünge aracı ve Schiaparelli test iniş aracı gönderen Avrupa Uzay Ajansı (ESA) ile Rus Roskosmos ajansı arasındaki ortak bir projedir.

Mercury-Redstone 3 veya Freedom 7, 5 Mayıs 1961'de astronot Alan Shepard tarafından yönetilen ilk ABD insanlı uzay uçuşuydu. Mercury Projesi'nin ilk mürettebatlı uçuşuydu. Projenin nihai amacı, bir astronotu Dünya çevresinde yörüngeye çıkarmak ve onu güvenli bir şekilde Dünya'ya geri getirmekti. Shepard'ın görevi, fırlatmanın yüksek g-kuvvetlerine ve atmosferik yeniden girişe dayanma yeteneğini göstermek olan birincil amacı olan 15 dakikalık bir yörünge altı uçuştu.

Zhurong, Çin'in başka bir gezegene indirdiği ilk Mars keşif aracıdır. Çin Ulusal Uzay İdaresi (CNSA) tarafından yürütülen Tianwen-1 Mars görevinin bir parçasıdır.