Matematikte türev, bir fonksiyonun tanımlı olduğu herhangi bir noktada değişim yönünü veya hızını veren temel bir kavramdır. Tek değişkenli bir fonksiyonun tanım kümesinin belli bir noktasında türevi, fonksiyonun grafiğine bu noktada karşılık gelen değerde çizilen teğet doğrunun eğimidir. Teğet doğru, tanım kümesinin bu noktasında fonksiyonun en iyi doğrusal yaklaşımıdır. Bu nedenle türev genellikle anlık değişim oranı ya da daha açık bir ifadeyle, bağımlı değişkendeki anlık değişimin bağımsız değişkendeki anlık değişime oranı olarak tanımlanır. Bir fonksiyonun türevini teorik olarak bulmaya türev alma denilir. Eğer bir fonksiyonun tanım kümesindeki her değerinde hesaplanan türev değerlerini veren başka bir fonksiyon varsa, bu fonksiyona eldeki fonksiyonun türevi denir.

Matematik, fizik ve mühendislikte, Öklid vektörü veya kısaca vektör sayısal büyüklüğü ve yönü olan geometrik bir objedir. Vektör, genellikle bir doğru parçası ile özdeşleştirilir. Bir başlangıç noktası A ile bir uç noktası B'yi birleştiren bir ok şeklinde görselleştirilir ve  ile belirtilir.
ile belirtilir.
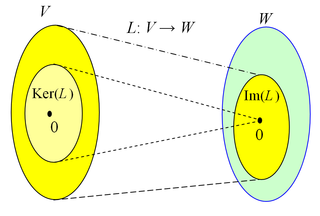
Doğrusal dönüşüm, bir fonksiyon çeşididir. T, M boyutlu bir vektörden N boyuta bir doğrusal dönüşüm ise, o zaman;
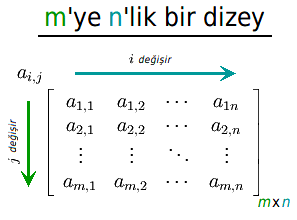
Matematikte matris veya dizey, dikdörtgen bir sayılar tablosu veya daha genel bir açıklamayla, toplanabilir veya çarpılabilir soyut miktarlar tablosudur. Dizeyler daha çok doğrusal denklemleri tanımlamak, doğrusal dönüşümlerde çarpanların takibi ve iki parametreye bağlı verilerin kaydedilmesi amacıyla kullanılırlar. Dizeylerin toplanabilir, çıkartılabilir, çarpılabilir, bölünebilir ve ayrıştırılabilir olmaları, doğrusal cebir ve dizey kuramının temel kavramı olmalarını sağlamıştır.
Olasılık kuramı ve istatistik bilim kollarında, çokdeğişirli normal dağılım veya çokdeğişirli Gauss-tipi dağılım, tek değişirli bir dağılım olan normal dağılımın çoklu değişirli hallere genelleştirilmesidir.

Doğrusal denklem dizgesi, birkaç tane aynı tip değişkenleri içeren birkaç tane doğrusal denklemlerin oluşturduğu topluluktur. Örneğin:

İstatistik'te, kovaryans matrisi, rassal vektörlerin elemanları arasındaki kovaryansları içeren matristir. Kovaryans matrisi, skaler-değerli rassal değişkenler için var olan varyans kavramının çok boyutlu durumlara genelleştirilmesidir.
Determinant kare bir matris ile ilişkili özel bir sayıdır.

Matematikte Öklid uzayı, Öklid geometrisinin üç boyutlu uzayıdır ve bu kavramlar, çok boyutlu olarak genelleştirilir. “Öklid” terimi bu uzayları, Öklid geometrisi olmayan eğimli uzaydan ve Einstein'nın genel görelilik kuramından ayırt eder. Bu adı Yunan matematikçi Öklid'den dolayı almıştır.
Doğrusal cebirde sütun vektör veya sütun matris, m × 1 matrisidir. Örneğin; tek bir m sütunundan oluşan bir matris şöyle ifade edilir;


Doğrusal cebirde, kare matris, satır ve sütun sayıları eşit olan bir matrisdir. n ye n lik bir matris, boyutu n olan bir kare matris olarak bilinir. Aynı boyuta sahip herhangi iki matriste, toplama ve çarpma işlemleri yapılabilir.
Doğrusal cebirde, satır vektör veya satır matris, 1 × m matrisidir. Örneğin; tek bir m sütunundan oluşan bir matris şöyle ifade edilir;

Doğrusal cebirde veya daha genel ifade ile matematikte matris çarpımı, bir matris çiftinde yapılan ve başka bir matris üreten ikili işlemdir. Reel veya karmaşık sayılar gibi sayılarda temel aritmetiğe uygun olarak çarpma yapılabilir. Başka bir ifade ile matrisler, sayı dizileridir. Bu yüzden, matris çarpımını ifade eden tek bir yöntem yoktur. "Matris çarpımı" terimi çoğunlukla, matris çarpımının farklı yöntemlerini ifade eder. Matris çarpımının anahtar özellikleri şunlardır: Asıl matrislerin satır ve sütun sayıları, ve matrislerin girişlerinin nasıl yeni bir matris oluşturacağıdır.
Doğrusal cebirde veya daha genel ifade ile matematikte matris toplamı, iki matrisin ilgili girişlerinin eklenmesi işlemidir. Matrisler için diğer bir toplama işlemi türü doğrudan toplamdır.
Successive Over-Relaxation (SOR) lineer denklem sistemlerini çözmek ve sonuca daha hızlı yakınsamak için sayısal lineer cebirde kullanılan bir çeşit Gauss-Seidel metodudur. Daha yavaş yakınsamalar içinse benzer bir metot olan iterative metot kullanılır.
Jacobi metodu, sayısal lineer cebirde lineer denklemlerin diyagonal olarak baskın sistemlerin çözümlerinin belirlenmesi için oluşturulmuş bir algoritmadır. Her diyagonal eleman tek tek çözülür ve yaklaşık bir değer olarak alınır. Bu aşama onlar yakınsayana kadar tekrarlanır. Bu algoritma matris köşegenleştirilmesi Jacobi dönüşüm metodunun sadeleştirilmiş şeklidir. Bu metot daha sonra Carl Gustav Jacob Jacobi olarak isimlendirilmiştir.
Matematikte, Hesse matrisi bir skaler değerli fonksiyonun ya da skaler alanın ikinci-dereceden kısmi türevlerinden oluşan kare matristir. Çok değişkenli bir fonksiyonun yerel eğriliğini ifade eder. Hesse matrisi, 19. yüzyılda Alman matematikçi Otto Hesse tarafından bulunmuştur ve ismini bu kişiden alır. Hesse'nin ilk kullandığı terim fonksiyonel determinantlardır.
Lineer cebirde, özdeğer ayrışımı ya da eigen ayrışımı, bir matrisin özdeğerleri ve özvektörleri cinsinden ifade edilen daha basit matrislere ayrıştırılmasıdır. Sadece kare matrisler özdeğerlerine ayrıştırılabilir.