Görsel gradyan

Görsel gradyan, bir görüntüdeki yoğunluk veya rengin yönsel olarak değişmesidir. Görsel gradyanı, görüntü işlemedeki temel yapı taşlarından biridir. Örneğin Canny kenar dedektörü, kenar tespiti için görsel gradyan gradyan kullanır. Dijital görüntü düzenlemeye yönelik grafik yazılımında, gradyan veya renk gradyanı terimi, sağdaki görüntülerde beyazdan siyaha doğru kullanıldığı gibi, düşük değerlerden yükseğe doğru eşit bir geçiş olarak değerlendirilebilecek kademeli bir renk karışımı için de kullanılır.
Dijital bir görüntünün yoğunluk işlevi yalnızca ayrı noktalarda bilindiğinden; bu işlevin türevleri, görüntü noktalarında örneklenen sürekli bir yoğunluk işlevinin mevcut olduğunu varsaymadıkça tanımlanamaz. Bazı ek varsayımlarla sürekli yoğunluk işlevinin türevi; örneklenmiş olarak, yani dijital görüntü üzerindeki bir işlev olarak hesaplanabilir. Bu türev işlevlerinin yaklaşımları değişen doğruluk derecelerinde tanımlanabilir. Görüntü gradyanını yaklaşık olarak hesaplamanın en yaygın yolu, bir görüntüyü Sobel operatörü veya Prewitt operatörü gibi bir çekirdekle evriştirmektir .
Görüntü gradyanları, ek bilgi iletmek amacıyla haritalarda ve verilerin diğer görsel temsillerinde da sıklıkla kullanılır. CBS araçları, diğerlerinin yanı sıra rakımı ve nüfus yoğunluğunu belirtmek için de renk geçişlerini kullanabilmektedir.
Bilgisayar görüşü
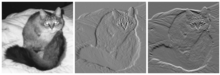
Bilgisayarla görmede, görüntülerden bilgi çıkarmak için görüntü gradyanları kullanılabilir. Gradyan görüntüler, bu amaç için orijinal görüntüden (genellikle en basitlerinden biri olan Sobel filtresi gibi bir filtreyle evriştirilerek) oluşturulur. Bir degrade görüntünün her pikseli, orijinal görüntüdeki aynı noktanın yoğunluğundaki değişimi belirli bir yönde ölçer. Tüm yön aralığını elde etmek için x ve y yönlerindeki gradyan görüntüleri hesaplanır.
En yaygın kullanımlardan biri kenar algılamadır. Gradyan görüntüleri hesaplandıktan sonra, büyük gradyan değerlerine sahip pikseller olası kenar pikselleri olarak değerlendirilebilmektedir. Gradyan yönünde en büyük değerleri sahip pikseller kenar pikselleri haline gelir ve kenarlar yöne dik yönde takip edilebilir. Degradeleri kullanan kenar algılama algoritmasının bir örneği Canny kenar dedektörüdür.
Görüntü gradyanları aynı zamanda özellik ve doku eşleştirmesi için de kullanılabilir. Farklı ışıklandırma veya kamera özellikleri, aynı sahnedeki iki görüntünün büyük ölçüde farklı piksel değerlerine sahip olmasına neden olabilir. Bu, eşleştirme algoritmalarının çok benzer veya aynı özellikleri eşleştirmede başarısız olmasına neden olabilir. Bunu çözmenin bir yolu, orijinal görüntülerden hesaplanan degrade görüntülere dayalı olarak doku veya özellik imzalarını hesaplamaktır. Bu degradeler ışıklandırma ve kamera değişikliklerinden daha az etkilenir, böylece eşleştirme hataları azalır.
Matematik
Bir görüntünün gradyanı, kısmi türevlerinin bir vektörüdür:[1] :165
- ,

Olaraktan:
- x'e respekt eden derifativdir (yatay gradyan)

- y'e respekt eden derifativdir (dikey gradyan)

olmaktadır.
Bir görüntünün türevi sonlu farklarla tahmin edilebilir. Merkezî fark kullanılırsa hesaplamak için görüntüye 1 boyutlu bir filtre uygulanabilir ( evrişim yoluyla):


Olaraktan, 1 boyutlu evrişim işlemini belirtmektedir. Bu 2 × 1 filtre görüntüyü yarım piksel kaydıracaktır. Bunu önlemek için aşağıdaki 3 × 1 filtre


kullanılabilir. Gradyan yönü formül aracılığı ile hesaplanabilir:[1]:706
- ,
![{\displaystyle \theta =\operatorname {tan{^{-}}{^{1}}} \left[{\frac {g_{y}}{g_{x}}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/432a871380023ae357bd53e546be12b3bb9be107)
ve büyüklük şu şekilde verilir:[2]

Ayrıca bakınız
- Akütans
- Gradyan-alanı resim işleme
- Renk bantlama
- Poster
- Reism derivativleri
- Toplam değişkenlik gürültüsüzleştirmeleri
Kaynaklar
- ^ a b Gonzalez, Rafael; Richard Woods (2008). Digital Image Processing. 3rd. Upper Saddle River, New Jersey: Pearson Education, Inc. ISBN 978-0-13-168728-8. 1 Haziran 2022 tarihinde kaynağından arşivlendi. Erişim tarihi: 1 Kasım 2023.
- ^ "Edges: Gradient Edge Detection". homepages.inf.ed.ac.uk. 24 Kasım 2005 tarihinde kaynağından arşivlendi. Erişim tarihi: 9 Nisan 2023.
Okumaya devam
- Shapiro, Linda; George Stockman (January 2001). "5, 7, 10". Computer Vision. Upper Saddle River, New Jersey: Prentice-Hall, Inc. ss. 157-158, 215-216, 299-300. ISBN 0-13-030796-3.
Dış bağlantılar
- GradientFilter işlevi
Renk konuları | ||
|---|---|---|
| Renk bilimi |  | |
| Renk felsefesi | ||
| Renk terimi | ||
| Renk organizasyonları |
| |
| Listeler |
| |
| Tonlar: |
| |
| İlgili |
| |