Dinamik sistem
Bu sayfa dinamik sistemlere dair genel bakış açılarını içerir ayrıntılı bilgi için dinamik sistem (tanım) veya çalışmak amaçlı dinamik sistemler teorisine bakabilirsiniz.
Dinamik sistem, geometrik uzay katmanındaki bir noktanın zamana bağlı durumunu tarif eder. Sarkaçlı bir saatin sarkacının salınımını, bir borudan geçen suyun hareketini ve her ilkbaharda bir göldeki balık sayısını (n değişimini/miktarını) anlatan matematiksel modeller buna bir örnektir.
Dinamik bir sistemin herhangi bir zaman aralığında/anında, reel sayılar ile (vektör ile) gösterilen bir konumu vardır, bu konum uzayda (çok katlı uzayda) uygun bir noktayla gösterilebilir. Sistemin durumunda meydana gelen ufak değişikliklere onu temsil eden rakamların değişikliği eşlik eder. Dinamik sistemlerdeki gelişim kanunu, dinamik bir sistemin şu anki durumunun gelecekteki geçireceği değişimleri açıklayan bir (şu anki durumun fonksiyonu) fonksiyonudur. Bu prensip rastgele sonuçlar üretmez, diğer bir deyişle sistemin şu anki durumunu takip edecek sadece tek bir gelecek durum vardır.[1][2]
Genel Bakış
Dinamik sistem orijinini klasik mekanik (Newton mekaniğinden) alır. Diğer doğa bilimleri ve mühendislik disiplinleri gibi, bir sistemin sadece kısa bir zaman sonraki durumunu bildiren gelişim kuralının, sistemle, kapalı bir ilişkisi vardır (bkz kapalı fonksiyon (bu ilişki diferansiyel denklem, yineleme ilişkisini açıklayan difference denklem ya da zaman -ölçek kalkulüsü-bkz time-scale calculus- gibi bağlamlardan herhangi biri olabilir). Sistemin gelecekteki tüm zamanlar boyunca durumunu gösterebilmek için bu hesaplama sürecinin, ölçülebilen her en düşük zaman aralığı için, tekrarlanması gerekir. Bu tekrarlama prosedürü sistemi analiz etmek/çözmek ya da integral hesabını (integral hesabında birim ölçütler toplanır özetle, ayrıntılı bilgi için integral) yapmak olarak da adlandırılabilir. Eğer sistem bu hesaplamalarla çözülebiliyorsa, verilen herhangi bir durum-zaman için bu sistemin gelecekteki durumları hesaplanabilir ve zaman boyunca sistemin durumunu simgeleyen bu noktalar orbit (yörünge, bir fonksiyonun grafiğinin noktalarla çizilmesi gibi) meydana getirir.
Bilgisayarların kullanımından önce, bu yörüngeyi bulmak oldukça kompleks matematiksel işlemler gerektiriyordu ve sadece sınırlı sayıda dinamik sistem için çözüm üretilebiliyordu. Sayısal yöntemleri kullanabilen elektronik hesaplama makineleri dinamik sistemlerin yörüngelerini belirleme hesaplamalarını basitleştirdi.
Basit dinamik sistemler için, yörüngesini bilmek yeterliydi ancak pek çok dinamik sistem sadece yörüngesiyle analiz edilemeyecek kadar komplekstir. Yörüngelerin bilinmesinin yetersiz kalmasının sebepleri:
- Çalışılan sistem sadece yaklaşık olarak ifade ediliyor olabilir; bu sistemin parametreleri kesin olarak bilinmiyor olabilir ya da bu sistemi ifade eden denklem çözülürken bazı terimler tam olarak hesaba katılamıyor olabilir. Sistemin yaklaşımlarla ifade edilmesi, bizi kullanılan yöntemlerin uygun ya da genel geçer olup olmadığı sorusuna yönlendirir. Bu tür sorulara cevaben uygulanan yöntemlerin isabetliliğini gösteren birkaç yöntem geliştirilmiştir, Lyapunov denkliği ve kurulum denkliği (ayrıntılı bilgi için bkz, Lyapunov stability ve structural stability). Dinamik sistemin denkliği ya da kararlılığı, yörüngelerin matematiksel modelleme ile verilen ilk pozisyonu arasındaki eşitliğin kurulabileceğinin göstergesidir. Yörüngelerin sistemle eşitliğini göstermek için kullanılacak denklik kavramları değiştikçe eşitlik hesapları da değişir.
- Yörüngenin ne tür olduğu daha önemli olabilir.Bazı yörüngeler, diğer yörüngeler sistemin farklı durumlarını gösteren farklı eğriler/doğrularken, periyodik olabilir. Genelde, hesaplamalar için bu farklı eğriler numaralandırılır (farklı sınıflara ayrılır) ya da tek bir sınıf altında toplanır. Tüm bu yörüngeleri sınıflandırma çalışmaları, bizi dinamik sistemler üstüne niteliksel bir çalışmaya götürür, koordinat değişiklikleriyle değişmeyen özelliklerin araştırılmasına. Lineer dinamik sistemler ve ikili ifadelerle durumu anlatan sistemler, sınıflandırılmış yörüngelerinden anlaşılmış dinamik sistemlere birer örnektir.
- Yörüngelerin davranışının (yönelişleri, eğimleri vb.) bir parametreye göre fonksiyonu bir uygulama için gerekli olan durumlar. Bir parametre değiştiğinde, dinamik sistemin davranışının değiştiğini işaret eden, dinamik sistemin yörüngesi çatallanabilir/yörüngeler ayrılabilir (bkz ayrım noktaları, bifurcation points). Örneğin; sadece periyodik bir yol izlerken bir anda rastgele bir yol izleyebilir (sıvının türbülansında olduğu gibi).
- Yörüngeler tamamen rastgele olabilir. Bu durumda en uzun yörüngeyi veya birden çok (fraklı davranan) yörüngeyi kullanarak ortalamanın alınması gerekebilir. Ergodik sistemler için ortalamalar oldukça iyi tanımlanmıştır (daha fazla bilgi için bkz Ergodik teori) ve daha detaylı olan hiperbolik sistemler içinde ortalama hesaplamaları ortaya konmuştur (bkz Anosov diffeomorphism). Dinamik sistemlerin olasılıklı halleri üstünde çalışmaların kazandırdığı kavrayış, istatistiksel mekanik ve kaos teorisinin temellerinin atılmasını sağlamıştır.
Tarihçe
Pek çok kişi dinamik sistemlerin kurucusu olarak Henri Poincaré'yi görür.[3] Poincaré, "New Methods of Celestial Mechanics" (gök mekaniğinde yeni yöntemler) (1892–1899) ve "Lectures on Celestial Mechanics" (gök mekaniği üstüne dersler) (1905–1910) isimli iki adet monografi yayınladı. Bu kitaplarda üçlü sistemler (hareketleri) üstündeki çalışmalarının sonucunda elde ettiği yöntemleri hatasız bir şekilde uyguladı ve çözümleri üstünde daha detaylı çalışmalar yaptı (frekansları, yörüngelerin denklikleri, asimptotları vb.). Bu kağıtlardaki çalışmalara göre. (Poincare'in yineleme teorisini de içeriyorlardı) Herhangi bir sistem yeterli bir zaman geçtikten sonra, yeterli ancak ölçülebilir zaman, ölçümün başladığı o ilk pozisyonuna çok yakın bir yere dönüyordu.
Aleksandr Lyapunov pek çok, önemli, yaklaşım yöntemleri geliştirdi. 1899 yılında geliştirdiği bu yöntemleri,adi diferansiyel denklem kümelerinin kararlığının hesaplanmasını mümkün kılıyordu. Dinamik sistemler için modern kararlılık teorisini üretmiştir.
1913 yılında, George David Birkhoff'un Poincaré'nin "son geometrik teorisini,üçlü sistemdeki özel bir durum için, kanıtlaması ismini dünyaya tanıttı. 1927 yılında, şimdi ergodik teorem olarak bilinen ve ortaya atmış olduğu en uzun ömürlü çalışması olan Dynamical Systems22 Nisan 2006 tarihinde Wayback Machine sitesinde arşivlendi. i yayınladı. Ergodik hipotezden edilmiş fiziksel sezinin ve matematiksel hesaplamayla kombine olması, en azından prensipte, istatistiksel mekaniğin temel sorununun çözümünü oluşturuyordu. Ergodik teori aynı zamanda dinamikten esinlenmeler de içerir.
Stephen Smale'in de büyük katkıları olmuştur. İlk katkısı at nalı haritası (ayrıntılı bilgi için bkz Horseshoe map) ile dinamik sistemlerde kayda değer çalışmalar yapmıştır. Ayrıca başkalarının pek çok kez baş vurduğu bir araştırma programı da yapmıştır.
1964 yılında Oleksandr Mykolaiovych Sharkovsky, kesintili (bkz discrete dynamical system) dinamik sistemlerin periyotları üstünde çalışması sonucu Sharkovsky teorisini geliştirmiştir. Teoremin çıkarımlarından birine göre, sayı doğrusundaki, kesintili bir dinamik sistem eğer üç adet periyot noktası barındırıyorsa diğer her periyotlarda da periyodik nokta bulundurmak zorundadır.
Temel tanımlar
Dinamik bir sistem çok katlı bir uzay (lineer uzanan, M diye adlandırılan, gelişim/evrilen fonksiyonlar Φt kümesini içeren uzay) katmanındaki noktanın tekrar o katmana (t geçen zamanı ifade ederken, t ∈ T) dönüşünü gösteren bir harita olarak düşünülebilir. Fonksiyonlardaki lineerlik kavramı, kullanılan uygulamalara ve çok katlıların tiplerine göre değişiklik gösterir. T kümeleri için birden fazla seçim olanağı olabilir. T gerçek sayılar kümesi olarak alındığında, dinamik sistem akışkan olarak nitelenebilir (bkz flow); eğer T sadece pozitif gerçek sayılar kümesi olarak alındığında, dinamik sistem yarı akışkan olarak nitelenir. T tam sayı kümesi olarak alındığında kaskat (cascade, şelale, ardışık kelimelerine karşılık gelir) ya da bir plan, sadece pozitif tam sayılar olarak alınırsa yarı kaskat olarak nitelendirilebilir.
Örnekler
Φt ile gösterilen gelişim fonksiyonu genelde hareket için yazılmış diferansiyel denklemin bir çözümüdür;

Bu denklem, faz uzayında, x0 (herhangi bir ilk konum demektir)dan başlayıp x(t)'yi izleyen yörüngenin zamanının türevini verir (üstünde noktayla gösterilmiş, türev). v(x) ile gösterilen vektör alanı, Min bu alanın her noktasında (faz uzayının her noktasında) dinamik sistem için hız vektörünü oluşturduğu lineer bir fonksiyondur (Tabii ki, bu hız vektörleri M faz uzayında/uzay katmanındaki herhangi bir vektör değil herhangi bir x noktası için TxM ile gösterilen eğim uzayında bulunan vektörlerdir-eğim uzayından kasıt, eğimi oluşturan ögelerin meydana getirdiği uzaydır-). Verilen Φt lineer fonksiyonundan otonom bir vektör alanı türetilebilir.
v(x) için ne yüksek dereceli türevlere ne de zaman parametresini kullanmaya gerek vardır çünkü bu çokluklar sistemleri çok boyutlu uzayda açıkladığımız zaman ortadan kalkarlar. Adi diferansiyel denklemlerin dışında kalan diğer diferansiyel denklem türleri de gelişim kuralını ifade etmek için kullanılabilir:

denklemi kompleks karışıklıklardan dolayı ifade edilmesi güçleşen mekanik bir sistemin farklı bir gösterimine örnektir.
Φt gelişim fonksiyonunu anlatmak için genelde adi diferansiyel denklemler kullanılır, bu durumda M, sonlu olan, çok katlı uzay boyutunu gösterir.Dinamik sistemlerdeki pek çok kavram, sonsuz katmanlı uzaylara dek genişletilebilir. Örnek: Banach uzayları-ayrıntılı bilgi için bkz banach sapaces- tabii bu durumda kısmi diferansiyel denklemler kullanılır. Yirminci yüzyılın sonlarında dinamik sistemlere kısmi diferansiyel kullanarak yaklaşmak oldukça yaygın bir kullanım olmuştu.
İleri düzey örnekler(ayrıntılı bilgi için orijinal isimlerine bakabilirsiniz)
- Logistic map,Bifurkasyon
- Complex quadratic polynomial,karmaşık karesel polinom
- Dyadic transformation,çiftli/diyadik dönüşüm
- Tent map,çadır planı
- Double pendulum,çifte sarkaç
- Arnold's cat map,Arnold'un kedi planı/haritası
- Horseshoe map
- Baker's map is an example of a chaotic piecewise linear map
- Billiards and outer billiards
- Hénon map
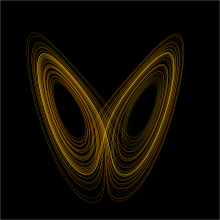
- Lorenz system
- Circle map
- Rössler map
- Kaplan-Yorke map
- List of chaotic maps,kaos haritaları listesi
- Swinging Atwood's machine,Salınan makara düzeneği
- Quadratic map simulation system
- Bouncing ball dynamics
Lineer dinamik sistemler
Lineer dinamik sistemler basit fonksiyonlar ya da sınıflandırılmış yörüngeler kullanılarak rahatlıkla ifade edilebilen dinamik sistemler sınıfıdır. N boyutlu Öklid uzayındaki uzay katmanları (nın herhangi biri) N tane vektör ile gösterilebilir. Lineer sistemler üstünde çalışmak mümkündür çünkü, çakışma prensibine uyarlar; eğer u(t) ve w(t) vektör alanı için olan diferansiyel denklemi sağlarlarsa (ilk konumu sağlamaları şart değildir) bunların toplamı da sağlar u(t)+w(t).
Akışlar
Bir akış için(sıvının akışı) Φ(x) vektör alanı, uzay katmanındaki bir konum için, afin fonksiyonudur,

bu denklemde A matris, b sayıların oluşturduğu vektör, x ise konum vektörüne karşılık gelir.Bu sistem çakışma prensibi(lineerlik) kullanılarak çözülebilir.
b ≠ 0 with A = 0 olması durumunda bu denklem b yönündeki bir doğru denklemidir.

b sıfır ve A≠0 iken, orijin akıştaki bir denge noktasıdır ve eğer x0= 0 ise yörünge sabit kalır.Bundan farklı ilk konumlar için bu hareket denklemi; matrisin, x0 ilk konumu için, üslü fonksiyonu kullanılarak oluşturulabilir.

b = 0 iken, Anın eigen değerleri uzay katmanının yapısını belirler. Anın eigen değerleri ve eigen vektörleri kullanılarak ilk konumun denge noktasına doğru yaklaşacağı ya da uzaklaşacağını hesaplamak mümkündür.
A ≠ 0 olduğu durumlarda iki farklı ilk konum arasındaki mesafe üssel olarak değişir, ya üssel olarak yaklaşır ya da üssel olarak uzaklaşırlar. Lineer sistemler, yaklaşma durumlarında, ilk konumlara oldukça hassas bir şekilde bağlıdırlar (ufak değişiklikler bile sonuçları değiştirir). Lineer olmayan sistemlerde bu (gerekli ancak yine de yeterli gelmeyen) kaotik teori için de gerekli şartlardandır.
Haritalar
Kesintili-zaman, afin dinamik sistemleri matris diferansiyel denklemi ile gösterilir (ayrıntılı bilgi için bkz;matrix difference equation):

A bir matrisi,b ise bir vektörü gösteriyor.Devamlı olan durumlarda,koordinatların dğişimi x → x + (1 − A) –1b denklemdeki b yi ortadan kaldırır.Yeni koordinat sisteminde,orijin haritada belli bir noktadadır ve lineer sistemin çözümleri;A nx0 ile gösterilir. haritanın çözümleri artık eğrilerle değil,uzay katmanlarından atlayan noktalarla gösterilir.Yörüngeler(haritanın üstündeki noktalar toplamının oluşturduğu),eğriler veya lifler şeklinde düzenlenir.
Devamlı olan durumlarda(devamlı fonksiyon gibi)olduğu gibi, Anın eigen değerleri ve vektörleri uzay katmanının yapısını belirler.Örneğin, u1 Anın eigen vektörü olsun,birden küçük eigen değeri için,α u1 noktalarından geçen doğrular(α ∈ R) haritadaki sabit eğrilerdir.Bu doğrudaki noktalar sabit değerlerdir.
Kesintili dinamik sistemlere daha çok örnek için bkz(List of chaotic maps,).
Yerel dinamikler
Dinamik sistemlerin niteliksel özellikleri koordinatlarda lineer değişimler olsa bile değişmez(bu açıklama bazen nitelik kavramının tanımı olarak görülür):vektör alanındaki yalnız bir nokta(v(x) = 0 olduğu nokta)lineer değişimler sonucu yine tek bir nokta olarak kalacaktır;periyodik yörünge,uzay katmanındaki bir döngü/düğümdür ve bu uzay katmanındaki lineer dönüşümler sonucu yine aynı döngü olarak kalacaktır.Dinamik sistemlerde uzay katmanındaki tek noktalar ve döngüsel yörüngelerin yakınları yeterince iyi anlaşılabilmektedir.Dinamik sistemler üstündeki kapsamlı çalışmalar gösteriyor ki;koordinatlardaki değişimi(değişimler spesifik olarak bilinmese de hesaplanabilir olduğu zaman) kullanarak dinamik sistemlerin analizleri çok daha kolay oluyor.
Düzenleme,idealleştirme
Uzay katmanının küçük parçacıklarının akışı çok basit formlara indirgenebilir.Eğer y v(y) ≠ 0 denkliğini sağlayan bir noktaysa,o halde ynin çevresindeki vektör alanının birbirine paralel ve aynı büyüklükte geçen vektörler olmasını sağlayacak bir koordinat değişikliği yapılabilir (bu değişiklik vardır).Bu düzenleme teoremi olarak bilinir.
Düzenleme teoremi der ki;tek noktalardan uzaktaki bir paketin içindeki noktanın dinamikleri bir doğruyu meydana getirir.Bu paket bazen başka paketlerle birleşerek büyüyebilir,ve bu çözüldüğünde,tüm uzay katmanı M için uzay integrallenebilirdir.Çoğu durumda bu paket tüm uzay katmanını dolduramaz.Vektör alanında tek noktalar olabilir (v(x) = 0 olduğunda)veya paketler bir noktaya yaklaşırken git gide küçülebilir.Bu genelin doldurulamayışı için daha sağlam bir neden,yörüngelerin paketten çıktıktan sonra(belki diğer paketlere uğradıktan sonra) yine aynı yerine dönmesi olabilir.Eğer yörünge bir döngüye girerse,bu vektör alanını düzenlemek tüm paketler için düzenlemek imkânsız olur.
periyodik yörüngelerin komşulukları
Genel olarak,periyodik bir yörüngenin çevresi için düzenleme teoremi kullanılamaz.Poincaré periyodik yörüngenin yakınlarının üstünde hesaplama yapılabilmesi için bir dönüşüm formülü geliştirdi .γ yörüngesinde bir x0 noktası seçin ve uzay katmanındaki o noktaya yakın noktaların v ye dik olduğunu görün(x0 iken). Bu noktalara,S(γ, x0) Pontcare kesiti(ayrıntılı bilgi için bkz,Poincaré section) denir.Şimdi akış bir haritayı gösteriyor,Poincaré haritasını F : S → S,Sden başlayıp Se dönen noktalar için.Her noktanın dönmesi için farklı farklı zamanlar geçecektir ancak geçen zamanlar ilk konumdan başlayana yakın olacaktır (x0).
Periyodik yörünge ile Poincare kesitinin kesiştiği nokta Poincare haritasında belirli bir noktaya karşılık gelir (F).Doğrusal yer değiştirme sonucu bu noktanın x = 0 a denk geleceği var sayılabilir.Haritanın Taylor serileri ile gösterilişi;F(x) = J • x + O(x2), yani koordinatlardaki bir değişikliğin,h,sadece Fnin lineer kısmının basitleşmesine neden olacağı tahmin edilebilir;

Bu birleşim denklemi olarak bilinir.Bu denklemin geçerli olduğu koşulların bulunması,dinamik sistemler üstündeki araştırmalarda en önemli önceliklerden biri olmuştur.Poincaré ilk olarak tüm fonksiyonların analiz edilebilir olduğunu varsayarak yaklaşmış ve rezonans olmama koşulunu keşfetmiştir.Eğerλ1, ..., λν sayıları J nin eigen değerleriyse,ve eigen değerlerinden biri lineer olarak(iki veya daha fazlasının)kombine edilmiş haliyse bu sayılar birbirinin rezonansı olmalıdır.λi – ∑ terimleri (diğer eigen değerlerinin katları)h fonksiyonunda payda da yer alırsa,rezonans olmama koşulu aynı zamanda küçük bölen problemi olarak da bilinir.
Birleşim/girişim Sonuçları
Birleşim denkleminin sonuçları olabilmesi,Jnin eigen değerlerine ve hnin derecesinin bir olmasına bağlıdır (lineer olması için).Jnin herhangi özel bir simetriye sahip olmasına gerek olmadığından,Jnin eigen değerleri karmaşık sayılar olabilir.jnin eigen değerleri birim çember üzerinde olmadığında,F üstündeki sabit x0 noktaları sabit hiperbolik noktalar olarak adlandırılır ve eigen değerleri çember üzerinde olmasının yanı sıra karmaşık sayılar olurlarsa eliptik olarak adlandırılır.
Hiperbolik olduğu durumda, Hartman–Grobman teoremi lineer haritadaki sabit J • x noktasının komşuluğunun devamlı olduğu fonksiyonu verecek olan şartları ortaya koyar.Hiperbolik durum aynı zamanda yapısal kararlılığa da sahiptir.Vektör alanındaki küçük değişiklikler Poincare haritasında sadece küçük değişiklikler yaratacak ve bu küçük değişiklikler Jnin eigen değerlerinde ufak değişiklikleri meydana getirecek(karmaşık sayılar düzleminde) ki bu yeni eigen değerlerinin görünümü yine hiperbolik bir şekle sahip olacak.
Kolmogorov–Arnold–Moser (KAM) teoremi eliptik noktanın komşuluğunun davranışını açıklar.
Bifurkasyon(çatallanma) teorisi
Gelişim haritası(ya da ondan türetilen vektör alanı) Φt μ gibi bir parametreye bağlı olduğu zaman uzay katmanının yapısı da bu parametreye bağlı olur.Belli bir μ0 değerine ulaşmadan,bu parametredeki değişimler uzay katmanında bir değişiklik yaratmazlar.O nokta aşıldıktan sonra uzay katmanı ölçülebilir bir şekilde değişir (değişim gözlemlenecek bir şekilde) ve dinamik sistemde bir çatallanma meydana gelir.
Bifurkasyon teorisi,uzay katmanının yapısı(özellikle sabit noktalar(bakzfized point,periyodik yörüngeler ya da sabit yumrular(bkztorus için)ve μ parametresi için davranışını/değişimini inceler.Çatallanma noktasında,yapı kararlılığını değiştirebilir,yeni yapılar oluşturmak üzere bölünebilir ya da diğer yapılarla birleşebilir.Taylor serileriyle yaklaşımları kullanarak ve koordinat değişikliği nedeniyle eksik kalan(yok olan) parametreleri anlayarak dinamik sistemlerdeki çatallanmaları sınıflandırmak mümkün olabilir.
Fμ ailesine ait bir hiperboliğin x0 noktasındaki çatallanmaları DFμ(x0) ile sistemin çatallanma noktasındaki ilk türevi alınarak hesaplanabilir.Haritada,DFμnin eigen değerlerinin bir çember üstünde olması orada çatallanma olacağını gösterir.Bir akışta eigen değerleri sanal eksen üstünde olduğunda çatallanma olur.Daha fazla bilgi için bkz Bifurkasyon teorisi
Bazı çatallanmalar uzay katmanında oldukça karışık yapıların meydana çıkmasına sebep olurlar.Öreğin;Ruelle–Takens senaryosu periyodik bir çatallanmanın bit yumruya,yumrunun da oldukça karmaşık bir çekiciye dönmesini anlatır (ayrıntılı bilgi için bkzstrange attractor,Ruelle–Takens scenario).Başka bir örnekle,Feigenbaum'un periyod çiftleşmesi sabit bir periyodik yörüngenin çifter periyodik çatallanmalara ayrıldıını anlatır (ayrıntılı bilgi çin bkz,period-doubling bifurcation).
Ergodik sistemler
Pek çok dinamik sistemde,hacmin(v boyutlu bir hacim) uzay katmanından bağımsız olacağı bir koordinat ekseni seçmek mümkündür.Bu Newton'un kanunlarına dayandırılarak üretilmiş sistemlerde mümkündür(kooridantlar konum ve momentum olacak şekilde bir koordinatlar ekseni,ve hacmin birimi(konum) × (momentum) birimleri cinsinden belirtildikçe).Akışta A kümesinden bir alt küme Φ t(A) fonksiyonuyla işleme sokulur ve uzay katmanından bağımsızlı şu denklikle gösterilir;

Hamilton mekaniğinde koordinatlar bilindikçe genel(çalışmalar için elverişli)bir momentum değeri,hacimden(akış sırasında hacmin korunan sistemler için) bulunabilir.Hacmin Liouville hesaplaması ile bulunabilir (ayrıntılı bilgi için bkz,Liouville measure).
Bir Hamilton sisteminde,her çeşit kozum-momentum değerini bulmak(ilk şartlar bilindiği takdirde) mümkün değildir.Çünkü enerji korunumu sadece ilk şartlardaki enerji miktarı ile eşit olan durumlar için uygulanabilirdir. Ω adlı enerji kabuğundaki enerji miktarıyla aynı olan enerjiler o uzay katmanının alt kümeleridirler.Enerji katmanının hacmi Liouville hesabıyla bulunur ve gelişim şartları altında korunurdur.
Akışlarda hacimleri korunan sistemlerde,Poincaré,Poincaré yineleme teorisini ortaya koydu.Bu teoreme göre;bir uzay katmanının sonlu bir Liouville hacmine sahip olduğunu ve Fnin hacim korunumlu bir uzay katmanı haritası ve Anın da uzay katmanının alt kümesi olduğunu var sayın.O halde (neredeyse)her bir A noktası tekrar A noktasına sonsuz sıklıkta döner.Poincaré'nin yineleme teorisi Zermelo tarafından Boltzmann'nın çarpışan atomların oluşturduğu dinamik sisteminden entropinin arttığı yönündeki çıkarımına itiraz etmek için kullanıldı.
Boltzmann'ın çalışmasına yöneltilen sorulardan biri,ortalama zaman ve ortalama uzayın arasındaki eşitlik olma ihtimaliyle ilgiliydi(ergodik hipotez olarak adlandırdığı).Hipoteze göre zamanın uzunluğu(vektörel)nun A bölgesinde katettiği miktar; vol(A)/vol(Ω) idi.
Ergodik hipotezin istatistiksel mekaniğin gelişimi için temel taş olmadığı ve ergodik benzeri diğer serilerin ilişkili fiziksel sistemlerin genel görünüşünü(çıkarım yapılabilecek görünüş)kısıtladığı ortaya atıldı.Koopman ergodik sistemlere fonksiyonel analiz kullanarak yaklaştı.a uzay katmanındaki her bir sayıyla(örneğin;ani basınç veya ortalama yükseklik) ilişkilendirilmiş olan bir fonksiyon olsun.Gözlemlenebilir değerleri başka bir zaman,gelişim fonksiyonu φ t,kullanarak ölçülebilir.Bu da bizi transfer operatörüne getirir ;U t

Lineer operatör(U)ün dağılımının özellikleri üzerinde çalışarak Φ t 'ın ergodik özelliklerini sınıflamak mümkündür.Koopman yaklaşımını kullanarak(akışın gözlemlenebilir bir fonksiyonu olduğu durumlar için),sonlu boyutlu lineer olmayan bir katman için geçerli bir problemde, Φ t fonksiyonu Uyu içeren sonlu-boyutlu bir harita ile ifade edilebilir.
Liouville hesabı,sadece enerji kabuğu(Ω)nun ortalama hesaplamları kullanıldığında geçerlidir (ayrıntılı bilgi için bkz,equilibrium statistical mechanics).Bir yönerge boyunca olan zamanın ortalamasının uzayın ortalamasının(vektörel) eşdeğer oluşu Boltzmann faktörüyle ölçülür(bkz, Boltzmann factor exp(−βH)).Bu fikir Sinai,Bowen ve Ruelle(SRB hesabı) gibi bilim insanları tarafından daha büyük sistem sınıfları için(korunmayan sistemlerde dahil) genellenmiştir.SRB hesabı kaotik sistemler için Boltzmann hesabı yerine kullanılmıştır.
Lineer olamayan dinamik sistemler ve kaos
Basit lineer olmayan denklemler ve hatta parçalı lineer sistemler bazen öngörülmemiş davranışlar sergileyebilir,rastgele davranır gibi, temelde tanımlı fonksiyonlar olsalar bile.Bu rast gele gibi görünen davranış kaos olarak adlandırılır.Anosov kaotik sistemler olarak adlandırılan bu sistemlere benzer davranışlar sergileyen dinamik sistemler tanımlamıştır (yüksek kesinliklerle,ayrıntılı bilgi için bkz,Hyperbolic systems).Hiperbolik sistemlerde eğim uzaylarının esas yörüngeye dik olduğu sistemler iki kısma ayrılabilir;yörüngeye yakınsak noktalar içerenler(kararlı çokkatlılar) ve yörüngeye ıraksak noktalar içeren(karasız çokkatlılar)ler.
Matematiğin bu dalı dinamik sistemlerin uzun dönem davranışlarını araştırır.Yani sadece spesifik bir kısmına odaklanmak o dinamik sistem için genel çözümler üretmemize yardımcı olmaz(bu yüzden bu dal böyle soruları sormak yerine) ancak sistem uzun bir dönem sonra kararlılık kazanacaksa bu dinginlik konumları hangi zamana denk gelir ya da uzun dönem davranışı sergileyen bu sistem kendisinin ilk şartlarından bağımsız mı hareket eder(gibi sorularla uğraşır)?
Karmaşık sistemlerin kaotik davranışından bahsetmediğimize dikkat edin.Meteoroloji karmaşık sistemler hatta kaotik davranışlar sergileyen sistemler üstüne uzun zamanlar boyunca çalışma yapmıştır.Koss teorisi hep şaşırtıcı olmuştur çünkü dikkat edilmeyen önemsiz sistemlerin dahi kaos içerdiği görülmüştür.Lojistik harita tek ikinci derece polinom dinamik sistemdir,atnalı haritası parçalı lineer sistem bir örnektir (ayrıntılı bilgi için bkz,horseshoe map,logistic map).
Geometrik tanım
Dinamik sistem bir değişkenler grubudur , birçok katlıyı gösterir (Banach veya Öklid uzayındaki), ise zamanın tanım kümesidir (pozitif gerçek sayılar tam sayılar vb ile gösterilebilir) ve f ise t → f t ile veya f t gösterilen gelişim kuralı( iken)ve çokkatlının diferansiyelidir (ayrıntılı bilgi için bkz,diffeomorphism).Yani f zamana bağlı nin kendi katlarına bağlı değişiminin haritasıdır.Başka bir deyişle,f(t) bir diferansiyellenebilir morfizmadır ( nin tanımlı olduğu her zaman,tdeğeri çin).




Teorik tanımın hesaplanması
Dinamik sistem formüllerle tanımlanabilir; sigma-cebirinde denkliğin korunduğu dönüşümler buna bir örnek olabilir (X, Σ, μ, τ dörtlüsü kullanılarak). Diyelim ki, X bir matematiksel küme ve Σ ise sigma-cebiri X ile olan, (ayrıntılı bilgi için bkz,sigma-algebra) sonuç olarak (X, Σ) ikilisi ölçülebilir bir uzay katanıdır. μ de sigma-cebiri ile ilişkilendirilmiş sonlu bir hesaplanma olsun ve (X, Σ, μ) üçlüsü olasılıksal uzayı oluşturur(ayrıntılı bilgi için bkz, probability space). Bir haritaın τ: X → X adlı ölçülebilir bir fonksiyonu sadece σ ∈ Σ nun olduğu koşullarda vardırve bir haritanın korunur denkliği/hesabı her σ ∈ Σ için sadece olduğunda vardır.Yukarıdakileri kombine edersek korunur denkliği/hesabı olan bir harita için(Xin yine X e döndüğü) Σ ile hesaplanabilir ve bu hesap korunurdur((X, Σ, μ, τ) dörtlüsü,τ için ifade edilirse dinamik sistem olarak gösterilebilir).


τ haritası somut bir zamana bağlı gelişimsel dinamik sistemdir.Bundan dolayı,kesintili dinamik sistemler için bu fonksiyon tekrarlanır (nlerşn tam sayı olduğu değerler için).Devamlı dinamik sistemler için bu τ haritası sonlu zamanla geişen bir gelişim fonksiyonu olarak düşünülebilir ve daha karmaşık sistemler kurulabilir.

Dinamik sistem örnekleri
- Arnold's cat map
- Baker's map is an example of a chaotic piecewise linear map
- Circle map
- Double pendulum
- Billiards and Outer billiards
- Hénon map
- Horseshoe map
- Irrational rotation
- List of chaotic maps
- Logistic map
- Lorenz system
- Rossler map
Çok boyutlu genelleme
Dinamik sistemler tek bir bağımsız değişken üstüne kuruludur(genelde bu değişken zamandır).Daha genel sistem sınıfları çoklu bağımsız değişkenler üstüne kuruludur ve bu yüzden çok boyutlu sistemler olarak adlandırılırlar.Bu tip sistemler matematiksel modelleme için kullanışlıdır, örneğin, görüntü işleme.
Ayrıca bakınız
- Behavioral modeling
- Cognitive modeling
- Dynamical systems theory
- Feedback passivation
- Infinite compositions of analytic functions
- List of dynamical system topics
- Oscillation
- People in systems and control
- Sharkovskii's theorem
- System dynamics
- Systems theory
Kaynakça
- ^ Strogatz, S. H. (2001). Nonlinear dynamics and chaos: with applications to physics, biology and chemistry. Perseus publishing.
- ^ Katok, A., & Hasselblatt, B. (1995). Introduction to the modern theory of dynamical systems. Cambridge, Cambridge.
- ^ Holmes, Philip. "Poincaré, celestial mechanics, dynamical-systems theory and “chaos”." Physics Reports 193.3 (1990): 137-163.
İleri düzey okulamar için
Works providing a broad coverage:
- Ralph Abraham and Jerrold E. Marsden (1978). Foundations of mechanics. Benjamin–Cummings. ISBN 0-8053-0102-X. (available as a reprint: ISBN 0-201-40840-6)
- Encyclopaedia of Mathematical Sciences (ISSN 0938-0396) has a sub-series on dynamical systems with reviews of current research.
- Christian Bonatti, Lorenzo J. Díaz, Marcelo Viana (2005). Dynamics Beyond Uniform Hyperbolicity: A Global Geometric and Probabilistic Perspective. Springer. ISBN 3-540-22066-6.
- Stephen Smale (1967). "Differentiable dynamical systems". Bulletin of the American Mathematical Society. 73 (6). ss. 747-817. doi:10.1090/S0002-9904-1967-11798-1.
Özgün üslupları olan giriş kitapları:
- V. I. Arnold (1982). Mathematical methods of classical mechanics. Springer-Verlag. ISBN 0-387-96890-3.
- Jacob Palis and Wellington de Melo (1982). Geometric theory of dynamical systems: an introduction. Springer-Verlag. ISBN 0-387-90668-1.
- David Ruelle (1989). Elements of Differentiable Dynamics and Bifurcation Theory. Academic Press. ISBN 0-12-601710-7.
- Tim Bedford, Michael Keane and Caroline Series, eds. (1991). Ergodic theory, symbolic dynamics and hyperbolic spaces. Oxford University Press. ISBN 0-19-853390-X.
- Ralph H. Abraham and Christopher D. Shaw (1992). Dynamics—the geometry of behavior, 2nd edition. Addison-Wesley. ISBN 0-201-56716-4.
Ders kitapları:
- Kathleen T. Alligood, Tim D. Sauer and James A. Yorke (2000). Chaos. An introduction to dynamical systems. Springer Verlag. ISBN 0-387-94677-2.
- Oded Galor (2011). Discrete Dynamical Systems. Springer. ISBN 978-3-642-07185-0.
- Anatole Katok and Boris Hasselblatt (1996). Introduction to the modern theory of dynamical systems. Cambridge. ISBN 0-521-57557-5.
- Guenter Ludyk (1985). Stability of Time-variant Discrete-Time Systems. Springer. ISBN 3-528-08911-3.
- Stephen Lynch (2010). Dynamical Systems with Applications using Maple 2nd Ed. Springer. ISBN 0-8176-4389-3.
- Stephen Lynch (2007). Dynamical Systems with Applications using Mathematica. Springer. ISBN 0-8176-4482-2.
- Stephen Lynch (2004). Dynamical Systems with Applications using MATLAB. Springer. ISBN 0-8176-4321-4.
- James Meiss (2007). Differential Dynamical Systems. SIAM. ISBN 0-89871-635-7.
- Morris W. Hirsch, Stephen Smale and Robert Devaney (2003). Differential Equations, dynamical systems, and an introduction to chaos. Academic Press. ISBN 0-12-349703-5.
- Julien Clinton Sprott (2003). Chaos and time-series analysis. Oxford University Press. ISBN 0-19-850839-5.
- Steven H. Strogatz (1994). Nonlinear dynamics and chaos: with applications to physics, biology chemistry and engineering. Addison Wesley. ISBN 0-201-54344-3.
- Teschl, Gerald (2012). Ordinary Differential Equations and Dynamical Systems. Providence: American Mathematical Society. ISBN 978-0-8218-8328-0. 26 Haziran 2012 tarihinde kaynağından arşivlendi. Erişim tarihi: 21 Ocak 2015.
- Stephen Wiggins (2003). Introduction to Applied Dynamical Systems and Chaos. Springer. ISBN 0-387-00177-8.
Popüler kaynaklar:
- Florin Diacu and Philip Holmes (1996). Celestial Encounters. Princeton. ISBN 0-691-02743-9.
- James Gleick (1988). Chaos: Making a New Science. Penguin. ISBN 0-14-009250-1.
- Ivar Ekeland (1990). Mathematics and the Unexpected (Paperback). University Of Chicago Press. ISBN 0-226-19990-8.
- Ian Stewart (1997). Does God Play Dice? The New Mathematics of Chaos. Penguin. ISBN 0-14-025602-4.
Dış bağlantılar
- Interactive applet for the Standard and Henon Maps13 Haziran 2011 tarihinde Wayback Machine sitesinde arşivlendi. by A. Luhn
- A collection of dynamic and non-linear system models and demo applets (in Monash University's Virtual Lab)
- Arxiv preprint server12 Ağustos 2013 tarihinde Wayback Machine sitesinde arşivlendi. has daily submissions of (non-refereed) manuscripts in Dinamik sistemler.
- DSWeb13 Ağustos 2006 tarihinde Wayback Machine sitesinde arşivlendi. provides up-to-date information on dynamical systems and its applications.
- Encyclopedia of dynamical systems16 Mayıs 2007 tarihinde Wayback Machine sitesinde arşivlendi. A part of Scholarpedia — peer reviewed and written by invited experts.
- Nonlinear Dynamics16 Ekim 2007 tarihinde Wayback Machine sitesinde arşivlendi.. Models of bifurcation and chaos by Elmer G. Wiens
- Oliver Knill11 Mart 2016 tarihinde Wayback Machine sitesinde arşivlendi. has a series of examples of dynamical systems with explanations and interactive controls.
- Sci.Nonlinear FAQ 2.0 (Sept 2003)5 Nisan 2007 tarihinde Wayback Machine sitesinde arşivlendi. provides definitions, explanations and resources related to nonlinear science
Çevrimiçi kitaplar ve ders notları:
- Geometrical theory of dynamical systems. Nils Berglund's lecture notes for a course at ETH at the advanced undergraduate level.
- Dynamical systems22 Nisan 2006 tarihinde Wayback Machine sitesinde arşivlendi.. George D. Birkhoff's 1927 book already takes a modern approach to dynamical systems.
- Chaos: classical and quantum25 Temmuz 2011 tarihinde Wayback Machine sitesinde arşivlendi.. An introduction to dynamical systems from the periodic orbit point of view.
- Modeling Dynamic Systems. An introduction to the development of mathematical models of dynamic systems.
- Learning Dynamical Systems12 Temmuz 2006 tarihinde Wayback Machine sitesinde arşivlendi.. Tutorial on learning dynamical systems.
- Ordinary Differential Equations and Dynamical Systems26 Haziran 2012 tarihinde Wayback Machine sitesinde arşivlendi.. Lecture notes by Gerald Teschl
araştırma grupları:
- Dynamical Systems Group Groningen3 Nisan 2007 tarihinde Wayback Machine sitesinde arşivlendi., IWI, University of Groningen.
- Chaos @ UMD12 Haziran 2005 tarihinde Wayback Machine sitesinde arşivlendi.. Concentrates on the applications of dynamical systems.
- Dynamical Systems, SUNY Stony Brook. Lists of conferences, researchers, and some açık sorular:
- Center for Dynamics and Geometry14 Temmuz 2014 tarihinde Wayback Machine sitesinde arşivlendi., Penn State.
- Control and Dynamical Systems 30 Mayıs 2014 tarihinde Wayback Machine sitesinde arşivlendi., Caltech.
- Laboratory of Nonlinear Systems, Ecole Polytechnique Fédérale de Lausanne (EPFL).
- Center for Dynamical Systems, University of Bremen
- Systems Analysis, Modelling and Prediction Group, University of Oxford
- Non-Linear Dynamics Group 3 Mart 2016 tarihinde Wayback Machine sitesinde arşivlendi., Instituto Superior Técnico, Technical University of Lisbon
- Dynamical Systems 2 Haziran 2017 tarihinde Wayback Machine sitesinde arşivlendi., IMPA, Instituto Nacional de Matemática Pura e Applicada.
- Nonlinear Dynamics Workgroup 21 Ocak 2015 tarihinde Wayback Machine sitesinde arşivlendi., Institute of Computer Science, Czech Academy of Sciences.
Simulation software based on Dynamical Systems approach:
- FyDiK20 Ocak 2009 tarihinde Wayback Machine sitesinde arşivlendi.
- iDMC[], simulation and dynamical analysis of nonlinear models
Sistem - Sistemler bilimi | |||||
|---|---|---|---|---|---|
| Sistem türleri | |||||
| Teorik alanlar |
| ||||
| Sistembilimciler |
| ||||
Şablon:Kaos teorisi