Rastgele erişimli hafıza veya rastgele erişimli bellek mikroişlemcili sistemlerde kullanılan, genellikle çalışma verileriyle birlikte makine kodunu depolamak için kullanılan herhangi bir sırada okunabilen ve değiştirilebilen bir tür geçici veri deposudur. Buna karşın diğer hafıza aygıtları saklama ortamındaki verilere önceden belirlenen bir sırada ulaşabilmektedir, çünkü mekanik tasarımları ancak buna izin vermektedir.

Makine, bir iş yapmak için kuvvet uygulamak ve hareketi kontrol etmek için güç kullanan fiziksel bir sistemdir. Terim genellikle motor kullanan yapay cihazlara veya moleküler makineler gibi doğal biyolojik makromoleküllere de uygulanır.

Mühendislik'te mekanizma, girdi kuvvetlerini ve hareketi istenen çıktı kuvveti ve hareket grubuna dönüştüren cihaz'dır. Mekanizmalar genellikle aşağıdakileri içerebilen hareketli bileşenlerden oluşur:
- Dişliler ve dişli trenleri;
- Kayışlar ve zincir tahrikleri;
- Kamlar ve kam takipçileri;
- Bağlantılar;
- Frenler veya debriyajlar gibi sürtünme cihazları;
- Şase, bağlantı elemanları, yataklar, yaylar veya yağlayıcılar gibi yapısal bileşenler;
- Yivli miller, pimler veya kamalar gibi çeşitli makine elemanları.

Elektrik motoru, elektrik enerjisini mekanik enerjiye dönüştüren aygıttır. Her elektrik motoru biri sabit (stator) ve diğeri kendi çevresinde dönen iki ana parçadan oluşur. Bu ana parçalar, sargılar gibi elektrik akımını ileten parçalar, manyetik akıyı ileten parçalar ve vidalar ve yataklar gibi konstrüksiyon parçaları olmak üzere tekrar kısımlara ayrılır.

Eklem, iki veya daha fazla kemiğin, vücut bölümlerinin hareket edebilmesini sağlamak maksadıyla birleştiği kısıma verilen ad.

Konik kesit, eliptik veya dairesel bir çift taraflı koninin, düzlemle kesitinden meydana gelen eğriler. Bunlar, çember, elips, parabol ve hiperboldür.
Hareket iletim sistemleri, olan hareketin doğası değişmeden mekanik enerjinin, bir nesneden diğer bir nesneye aktarılması söz konusudur.

Yüzgeç, balığın su içeresindeki hareketine yardımcı olan organlardır. Balıklarda yüzgeçler kara hayvanlarındaki kol ve bacaklara eşdeğerdir. Balığın su içerisindeki yüzme işlemi büyük ölçüde kaslarla sağlanır. Bu harekete farklı yüzgeçli değişik görevler için yardımcı olurlar.

Sismograf ya da depremyazar,, depremler, volkanik patlamalar ve patlamaların neden olduğu yer seslerini ve sarsıntılarını sürekli olarak kaydederek yer sarsıntılarının büyüklüğünü, süresini, merkezini ve zamanını saptamaya yarayan alete denir. Genellikle sismograf ‘ın zamanlama ve kayıt cihazı vardır. Daha önce kağıda veya filme ama atık dijital olarak kaydedilen ve işlenen bu cihazın çıktısı bir sismogramdır. Bu tür veriler depremlerin yerini belirlemek ve karakterize etmek ve Dünya'nın iç yapısını incelemek için kullanılır.
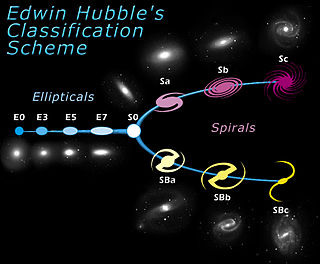
Biçimsel galaksi sınıflandırması, astronomların gökadaları görünüşlerine göre gruplara ayırdıkları bir sınıflandırma sistemidir. Gökadaları görünüşlerine göre sınıflandırmak için kullanılan birkaç şema bulunmaktadır. Bunların en bilineni Edwin Hubble tarafından tasarlanan ve Gérard de Vaucouleurs ile Allan Sandage tarafından genişletilen Hubble düzenidir. Gökada sınıflandırması ve morfolojisi artık büyük ölçüde hesaplama yöntemleri ve fiziksel morfoloji kullanılarak yapılır.

İnsan anatomisinde ayak bileği eklemi, ayak ile bacağın birleştiği yerde oluşmuştur. Ayak bileği veya talocrural eklem, tibia ve fibulanın iki distal ucunu bağlayan sinoviyal menteşe tipi bir eklemdir. Tibia ve talus arasındaki eklem, daha küçük olan fibula ve talus arasındaki eklemden daha fazla ağırlık taşır.

Kule vinç, genellikle şantiyelerde sabit ya da hareketli bir taşıyıcı üzerinde ağır yüklerin yatayda ve düşeyde taşınmasını sağlayan çelik strüktürdeki bir makinedir. Kule gibi yükselen bir gövdesi olduğundan bu şekilde isimlendirilmiştir. Gövde bölümü dışında BOM adı verilen ağırlık taşıyan kolu vardır. Bu kolu dengelemek için bomun arka ucunda denge taşları vardır. Kule vinçlerin birçok tipi vardır. Kendi başlarına ayakta durabildikleri gibi bina yükseldikçe onunla beraber yükselirler. Yapıya çeşitli aralıklarla atılan bağlantı ankrajlarıyla sabitlenirler. Kule vinçler yükseltilmek istendiğinde orta kısımlarında bulunan ekleme bölümünün vinci ortadan ayırıp yükseltir, bu oluşan yeni boşluğa vinç dışarıdan gelen ek parçayı kaldırıp yanaştırır. Yanaşan parça içe alınıp monte edilir ve bağlanır. Kule vinçleri, kule vinç operatörleri yönetir. Gövde ile bomun kesiştiği yerde bulunan kabinde çalışırlar.

Kapı, bir mekâna ya da bir taşıta girip çıkarken geçilen, mafsallı, sürgülü ya da elektronik aksamlı açılıp kapanabilir levha ya da bölme açıklığıdır. Kapılar, yapıların içine girmeye veya yapı içindeki odalar arasında yer değiştirebilmeye olanak sağlayan, temelde tüm dünya kültürlerinde aynı biçimde kullanılan mimari ögelerdir. Elektronik kilitli otomatik kapılar da vardır.

Makara, balık tutma aracı olan misinanın sarılarak balık tutma esnasında misinanın toplanması ya da gevşetilmesi işlemini gerçekleştiren araca verilen addır. Makara mekanizması bu anlamda esas olarak sarma ve misina uzunluğunu ayarlama ve dolayısıyla dengesini sağlama gibi işlevler görmektedir. Makara mekanizması, misinanın ileri uzatılması ve oltanın atılması işlevlerini gören çubuk ya da kamış ile bir bütündür. Özellikle amatör balıkçılıkta kullanılmaktadır.

Bobin ya da makara, içinden elektrik akımı geçebilen, yalıtılmış tel ile bu telin sarılı bulunduğu silindirden oluşan aygıt.

Endüstriyel robot, ISO 8373 standardına göre üretim için kullanılan robot sistemidir. Endüstriyel robotlar otomatiktir, programlanabilir ve üç veya daha fazla eksende hareket edebilir.

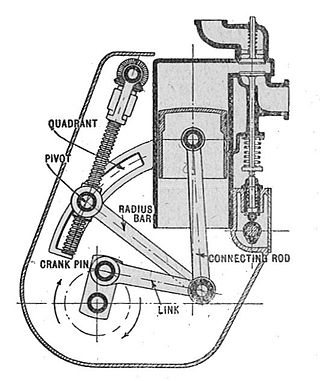
Düz-çizgi mekanizması, her türlü dönme veya açısal hareketi mükemmel veya mükemmele yakın düz çizgi hareketine dönüştüren bir mekanizmadır. Düz çizgi hareketi, belirli uzunluktaki veya "darbeli" doğrusal harekettir; her ileri hareketi, ileri geri hareket veren bir geri dönüş hareketi takip eder.

Menteşe, iki katı nesneyi birbirine bağlayan ve genellikle aralarında yalnızca sınırlı bir dönüş açısına izin veren mekanik bir yataktır. Menteşe, cam panellerin duş veya küvet klozetlerine monte edilmesinde kullanışlıdır. İdeal bir menteşe ile bağlanan iki nesne sabit bir dönme ekseni etrafında birbirine göre döner: diğer tüm ötelemeler veya dönmeler engellenir ve dolayısıyla bir menteşenin bir serbestlik derecesi vardır. Menteşeler esnek malzemeden veya hareketli bileşenlerden yapılabilir. Biyolojide birçok eklem, dirsek eklemi gibi menteşe işlevi görür.
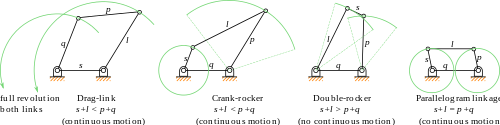
Bağlantı, kuvvetleri ve hareketi yönetmek için bağlanan bir mekanik gövde grubudur. Bir cismin veya bağlantının hareketi, geometri kullanılarak incelenir, bu nedenle bağlantının katı olduğu kabul edilir. Bağlantılar arasındaki bağlantılar örneğin ideal hareket, saf dönüş veya kaymayı sağlayacak şekilde modellenir ve eklemler olarak adlandırılır. Katı bağlantılar ve ideal eklemlerden oluşan bir ağ olarak modellenen bir bağlantıya kinematik zincir denir.

Robot kol, insan kolu ile benzer işlevleri olan ve genellikle programlanabilir mekanik bir koldur. Kol, mekanizmanın toplamı veya karmaşık bir robotun parçası olabilir. Böyle bir manipülatörün bağlantıları dönme hareketine veya doğrusal yer değiştirmeyi sağlayan eklemlerle bağlanır. Manipülatör bağlantıları kinematik bir zincir oluşturur. Manipülatörün kinematik zincirinin ucuna son efektör denir ve insan eline benzer.