Döner kodlayıcı
Döner kodlayıcı, mil kodlayıcı da denir ve bir milin veya aksın açısal konumunu veya hareketini analog veya dijital çıkış sinyallerine dönüştüren elektromekanik bir cihazdır.[1]
Mutlak ve artımlı olarak iki döner kodlayıcı türü vardır. Mutlak kodlayıcının çıktısı, kendisini açı dönüştürücüsü yapan mevcut mil konumunu gösterir. Artımlı kodlayıcının çıktısı, milin hareketi hakkında bilgi verir ve bu genellikle başka bir yerde konum, hız ve mesafe gibi bilgilere işlenir.
Döner kodlayıcılar, endüstriyel kontroller, robotik, fotoğrafik lensler,[2] optomekanik fareler ve iz topları gibi bilgisayar giriş aygıtları, kontrollü stres reometreleri ve dönen radar platformları dahil olmak üzere mekanik sistemlerin izlenmesini veya kontrolünü veya her ikisini de gerektiren çok çeşitli uygulamalarda kullanılır.
Teknolojiler

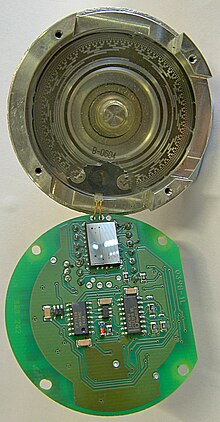
- Mekanik: İletken kodlayıcılar olarak da bilinir. Bir PCB üzerine kazınmış bir çok halka yol bakır iz, iletken alanları algılayan temas fırçaları aracılığıyla bilgiyi kodlamak için kullanılır. Mekanik kodlayıcılar ekonomiktir ancak mekanik aşınmaya karşı hassastır. Dijital multimetreler gibi insan arayüzlerinde yaygındırlar.[3]
- Optik: Bu, bir metal veya cam diskteki yarıklar aracılığıyla bir fotodiyot üzerine parlayan ışık kullanır. Yansıtıcı versiyonları da mevcuttur. Bu en yaygın teknolojilerden biridir. Optik kodlayıcılar toza karşı çok hassastır.
- Eksen Üzerinde Manyetik: Bu teknoloji genellikle motor miline takılı özel olarak mıknatıslanmış 2 kutuplu bir neodimyum mıknatıs kullanır. Milin ucuna sabitlenebildiği için motor gövdesinden yalnızca 1 mili çıkan motorlarla çalışabilir. Doğruluk birkaç dereceden 1 derecenin altına kadar değişebilir. Çözünürlükler 1 derece kadar az veya 0,09 derece kadar yüksek olabilir (4000 CPR, Devir Başına Sayım).[4] Kötü tasarlanmış dahili enterpolasyon çıkış titremesine neden olabilir, ancak bu dahili örnek ortalaması ile aşılabilir.
- Eksen Dışı Manyetik: Bu teknoloji tipik olarak metal bir göbeğe tutturulmuş kauçuk bağlı ferrit mıknatısların kullanımını kullanır. Bu, tasarımda esneklik ve özel uygulamalar için az maliyetlidir. Birçok eksen dışı kodlayıcı çipindeki esneklik nedeniyle çipin uygulama için gereken herhangi bir konuma yerleştirilebilmesi için herhangi bir sayıda kutup genişliğini kabul edecek şekilde programlanabilirler. Manyetik kodlayıcılar, optik kodlayıcıların çalışmayacağı zorlu ortamlarda çalışır.
Temel türler
Mutlak
Mutlak kodlayıcı, kodlayıcının gücü kesildiğinde konum bilgisini korur.[5] Kodlayıcının konumu, güç uygulandığında hemen kullanılabilir. Kodlayıcı değeri ile kontrol edilen makinenin fiziksel konumu arasındaki ilişki montaj sırasında ayarlanır; konum doğruluğunu korumak için sistemin bir kalibrasyon noktasına dönmesine gerek yoktur.
Mutlak bir kodlayıcı, kodlayıcının bir devir içindeki mutlak konumunu temsil eden bir veri kelimesi sağlayan, çeşitli ikili ağırlıklara sahip birden çok kod halkasına sahiptir. Bu tip kodlayıcıya genellikle paralel mutlak kodlayıcı denir.[6]
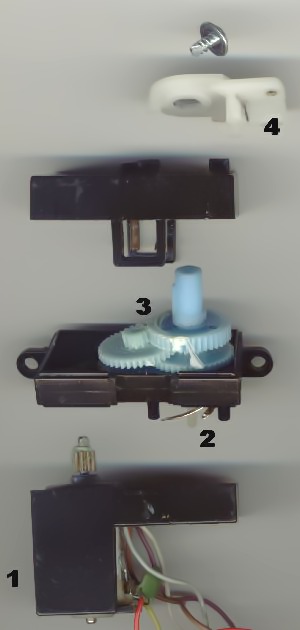
Çok turlu mutlak döner kodlayıcı, ek kod tekerlekleri ve dişli çarklar içerir. Yüksek çözünürlüklü bir çark, kesirli dönüşü ölçer ve daha az çözünürlüklü dişli kodlu çarklar, milin tam devir sayısını kaydeder.[7]
Artımlı

Bir artımlı kodlayıcı, bazı uygulamalarda önemli bir özellik olan konumdaki değişiklikleri anında rapor eder. Ancak mutlak konumu raporlamaz veya takip etmez. Sonuç olarak, artımlı bir kodlayıcı tarafından izlenen mekanik sistemin mutlak konum ölçümlerini başlatmak için yuvaya getirme (sabit bir referans noktasına taşınması) gerekebilir.
Mutlak kodlayıcı
Mutlak döner kodlayıcı
Yapısı
Dijital mutlak kodlayıcılar, milin her farklı açısı için benzersiz bir dijital kod üretir. Optik ve mekanik olmak üzere iki tipi vardır.
Mekanik mutlak kodlayıcılar
Bir dizi eşmerkezli halkası olan metal bir disk, mile sıkı bir şekilde sabitlenen bir yalıtım diskine sabitlenir. Bir dizi kayan kontak sabit bir nesneye sabitlenir, böylece her kontak milin farklı mesafedeki metal diske sürülür. Disk mil ile birlikte dönerken, bazı temas noktaları metale temas ederken diğerleri metalin kesildiği boşluklara düşer. Metal levha bir elektrik akımı kaynağına bağlanır ve her kontak ayrı bir elektrik sensörüne bağlanır. Metal desen, eksenin her olası konumu, bazı kontakların akım kaynağına bağlı olduğu (yani açık) ve diğerlerinin olmadığı (yani kapalı) benzersiz bir ikili kod oluşturacak şekilde tasarlanmıştır.
Fırça tipi kontaklar aşınmaya karşı hassastır ve sonuç olarak mekanik kodlayıcılar genellikle elle ses seviyesi ayarı veya radyo alıcısındaki ayar kontrolleri gibi az hızlı uygulamalarda bulunur.
Optik mutlak kodlayıcılar
Optik kodlayıcının diski, şeffaf ve opak alanlara sahip cam veya plastikten yapılmıştır. Bir ışık kaynağı ve foto detektör dizisi, herhangi bir zamanda diskin konumundan kaynaklanan optik modeli okur.[8]Gray kodu sık kullanılır. Bu kod, mil açısını belirlemek için mikroişlemci veya mikrodenetleyici gibi bir kontrol cihazı tarafından okunabilir.
Mutlak analog tipi, milin mutlak açısına çevrilebilen benzersiz bir ikili analog kod üretir.
Manyetik mutlak kodlayıcılar
Manyetik kodlayıcı, kodlayıcı konumunu manyetik bir sensöre (genellikle manyeto-dirençli veya Hall etkisi) temsil etmek için bir dizi manyetik kutup (2 veya daha fazla) kullanır. Manyetik sensör manyetik kutup konumlarını okur.
Bu kod, optik kodlayıcıya benzer şekilde şaftın açısını belirlemek için mikroişlemci veya mikrodenetleyici gibi bir kontrol cihazı tarafından okunabilir.
Mutlak analog tipi, milin mutlak açısına çevrilebilen (özel bir algoritma kullanılarak) benzersiz bir ikili analog kod üretir.
Manyetik etkileri kaydetmenin doğasından dolayı, bu kodlayıcıların toz veya birikinti birikmesi nedeniyle diğer kodlayıcı türlerinin arızalanabileceği koşullarda kullanılması en uygun seçenek olabilir. Manyetik kodlayıcılar ayrıca titreşimlere, küçük yanlış hizalamalara veya darbelere karşı nispeten duyarsızdır.
- Fırçasız motor komütasyonu
Dahili döner kodlayıcılar, CNC makinelerde, robotlarda ve diğer endüstriyel ekipmanlarda yaygın olarak kullanılan sabit mıknatıslı fırçasız motorlarda motor mil açısını belirtmek için kullanılır. Bu gibi durumlarda kodlayıcı, ekipmanın düzgün çalışmasında hayati bir rol oynayan bir geri bildirim cihazı görevi görür. Fırçasız motorlar, genellikle kısmen rotor mıknatıslarının az çözünürlüklü mutlak kodlayıcı (tipik olarak devir başına altı veya on iki darbe) olarak kullanılmasıyla uygulanan elektronik komütasyon gerektirir. Ortaya çıkan mil açı bilgisi, herhangi bir zamanda uygun stator sargısına enerji verilmesini sağlamak için servo sürücüye iletilir.
Kapasitif mutlak kodlayıcılar
Kodlayıcının içinde asimetrik şekilli bir disk döndürülür. Bu disk, ölçülebilen ve hesaplanabilen iki elektrot arasındaki kapasitansı açısal bir değere değiştirir.[9]
Mutlak çok turlu kodlayıcı
Çok turlu bir kodlayıcı birden fazla dönüşü algılayabilir ve saklayabilir. Mutlak çok turlu enkoder terimi genellikle, kodlayıcıya harici güç sağlanmasa bile kodlayıcı milinin hareketlerini tespit etmesi durumunda kullanılır.
Pil ile çalışan çok turlu kodlayıcı
Bu tür kodlayıcı, güç döngüleri boyunca sayımları korumak için bir pil kullanır. Hareketleri algılamak için enerji tasarruflu elektrik tasarımı kullanır.
Dişlili çok turlu kodlayıcı
Bu kodlayıcılar, devir sayısını mekanik olarak saklamak için bir dişli dizisi kullanır. Tek dişlilerin konumu yukarıda belirtilen teknolojilerden biriyle algılanır.[10]
Kendinden güç alan çok turlu kodlayıcı
Bu kodlayıcılar, hareketli şafttan enerji üretmek için enerji hasadı ilkesini kullanır. 2007'de tanıtılan bu prensip[11], kodlayıcıya güç sağlamaya ve dönüş sayısını kalıcı belleğe yazmaya yetecek elektriği üretmek için bir Wiegand sensörü kullanır.[12]
Standart ikili kodlama

Yalnızca üç kontaklı son derece basitleştirilmiş bir kodlayıcıda ikili kodun örneği aşağıdadır.
| Sektör | Kontak 1 | Kontak 2 | Kontak 3 | Açı |
|---|---|---|---|---|
| 0 | off | off | off | 0°'dan 45°'ye |
| 1 | off | off | ON | 45°'den 90°'ye |
| 2 | off | ON | off | 90°'den 135°'ye |
| 3 | off | ON | ON | 135°'den 180°'ye |
| 4 | ON | off | off | 180°'den 225°'ye |
| 5 | ON | off | ON | 225°'den 270°'ye |
| 6 | ON | ON | off | 270°'den 315°'ye |
| 7 | ON | ON | ON | 315°'den 360°'ye |
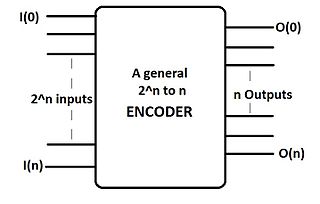
Genellikle n sayıda kontağın olduğu yerde milin farklı konumlarının sayısı 2n'tir. Bu örnekte n 3'tür, dolayısıyla 2³ veya 8 konum vardır.
Yukarıdaki örnekte, disk döndükçe kontaklar standart ikili sayım üretir. Ancak bunun dezavantajı, diskin iki bitişik sektör arasında durması veya kontakların mükemmel şekilde hizalanmaması durumunda milin açısını belirlemenin imkansız olabilmesidir. Bu sorunu göstermek için, mil açısı 179,9°'den 180,1°'ye (sektör 3'ten sektör 4'e) değiştiğinde ne olacağını düşünün. Bir anda, yukarıdaki tabloya göre, kontak düzeni kapalı-açık-açık durumundan açık-kapalı-kapalı durumuna değişir. Ancak gerçekte olan bu değildir. Pratik bir cihazda kontaklar hiçbir zaman mükemmel şekilde hizalanmaz, dolayısıyla her biri farklı bir anda değişir. Örneğin önce kontak 1, ardından kontak 3 ve sonra kontak 2 değişirse, gerçek kod sırası şöyledir:
- off-on-on (başlangıç konumu)
- on-on-on (ilk olarak kontak 1 iletir)
- on-on-off (sonra, 3 numaralı kontak akımı iletmez)
- on-off-off (son olarak 2 numaralı kontak akımı keser)
Şimdi tabloda bu kodlara karşılık gelen sektörlere bakın. Sırasıyla 3, 7, 6 ve sonra 4'tür. Üretilen kod dizisinden, milin sektör 3'ten sektör 7'ye atladığı, ardından sektör 6'ya geri döndüğü, sonra tekrar sektör 4'e geri döndüğü görülüyor ki onu bulmayı beklediğimiz yer burası. Çoğu durumda bu davranış istenmeyen bir durumdur ve sistemin arızalanmasına neden olabilir. Örneğin, kodlayıcı bir robot kolunda kullanılmışsa, kontrolcü kolun yanlış konumda olduğunu düşünecek ve 180° döndürerek hatayı düzeltmeye çalışacak, belki de kola zarar verecektir.
Gray kodlaması

Yukarıdaki sorunu önlemek için Gray kodlaması kullanılır. Bu, herhangi iki bitişik kodun yalnızca bir bit konumu kadar farklı olduğu ikili sayma sistemidir. Yukarıda verilen üç kontaklı örnek için Gray kodlu versiyon aşağıdaki gibidir.
| Sektör | Kontak 1 | Kontak 2 | Kontak 3 | Açı |
|---|---|---|---|---|
| 0 | off | off | off | 0°'dan 45°'ye |
| 1 | off | off | ON | 45°'den 90°'ye |
| 2 | off | ON | ON | 90°'den 135°'ye |
| 3 | off | ON | off | 135°'den 180°'ye |
| 4 | ON | ON | off | 180°'den 225°'ye |
| 5 | ON | ON | ON | 225°'den 270°'ye |
| 6 | ON | off | ON | 270°'den 315°'ye |
| 7 | ON | off | off | 315°'den 360°'ye |
Bu örnekte, sektör 3'ten sektör 4'e geçiş, diğer tüm geçişler gibi, kontaklardan yalnızca birinin durumunu açıktan kapalıya veya tam tersi şekilde değiştirmesini içerir. Bu, önceki çizimde gösterilen hatalı kod dizisinin gerçekleşemeyeceği anlamına gelir.
Tek kanallı Gray kodlaması
Tasarımcı bir kontağı farklı açısal konuma (ancak milin merkezinden aynı uzaklıkta) hareket ettirirse, o zaman karşılık gelen "halka modelinin" aynı çıktıyı sağlamak için aynı açıda döndürülmesi gerekir. En önemli bit (Şekil 1'deki iç halka) yeterince döndürülürse, bir sonraki halkayla tam olarak eşleşir. Her iki halka da aynı olduğundan, iç halka çıkarılabilir ve bu halkanın sensörü geri kalan aynı halkaya taşınabilir (ancak o halkadaki diğer sensörden bu açıyla kaydırılmış). Tek bir halka üzerindeki bu iki sensör, tek halkalı bir karesel kodlayıcı oluşturur.
Ardışık konumların yalnızca tek bir sensörde farklılık göstermesi için tek halka yol etrafında birkaç sensör düzenlemek mümkündür ki bu sonuç, tek kanallı Gray kodu kodlayıcıdır.
Veri çıkış yöntemleri
Cihaza ve üreticiye bağlı olarak mutlak bir enkoder, verileri iletmek için paralel ikili, analog sinyaller (akım veya voltaj) ve SSI, BiSS, Heidenhain EnDat, Sick-Stegmann Hiperface, DeviceNet, Modbus, Profibus, CANopen ve genellikle Ethernet veya RS-422/RS-485 fiziksel katmanlarını kullanan EtherCAT gibi seri veri yolu sistemleri dahil olmak üzere çeşitli sinyal türlerinden ve iletişim protokollerinden herhangi birini kullanabilir.
Artımlı kodlayıcı



Döner artımlı kodlayıcı, gerçek zamanlı konum bilgisi sağlama yeteneği nedeniyle tüm döner kodlayıcılar arasında en yaygın kullanılanıdır. Artımlı kodlayıcının ölçüm çözünürlüğü hiçbir şekilde iki dahili artımlı hareket sensörüyle sınırlı değildir; Piyasada devir başına 10.000'e kadar veya daha fazla sayım yapabilen artımlı kodlayıcılar bulunabilir.
Döner artımlı kodlayıcılar, herhangi bir uyarıda bulunulmadan konum değişikliklerini bildirir ve bu bilgiyi, çoğu mutlak mil kodlayııcı tipinden çok daha hızlı veri hızlarında aktarırlar. Bu nedenle artımlı kodlayıcılar, konum ve hızın hassas ölçümünü gerektiren uygulamalarda yaygın kullanılır.
Döner artımlı kodlayıcı, dönme konum değişikliklerini belirlemek için mekanik, optik veya manyetik sensörler kullanabilir. Mekanik tip genellikle elektronik ekipman üzerinde manuel olarak çalıştırılan bir "dijital potansiyometre" kontrolü olarak kullanılır. Örneğin, modern ev ve araba stereoları ses seviyesi kontrolleri olarak genellikle mekanik döner kodlayıcılar kullanır. Mekanik sensörlü kodlayıcılar geri sıçrama anahtarına ihtiyaç duyar ve dolayısıyla işleyebilecekleri dönüş hızları sınırlıdır. Optik tip, daha yüksek hızlarla karşılaşıldığında veya daha yüksek derecede hassasiyet gerektiğinde kullanılır.
Döner artımlı kodlayıcı, kodlayıcı mili döndüğünde karesel olarak periyodik bir dijital dalga biçimi yayınlayan A ve B olmak üzere iki çıkış sinyaline sahiptir. Bu, karesel olarak sinüzoidal dalga şekilleri (yani sinüs ve kosinüs) çıkaran sinüs kodlayıcılara benzer,[13] böylece kodlayıcının ve çözümleyicinin özelliklerini birleştirir. Dalga biçim frekansı mil dönüş hızını, darbe sayısı ise kat edilen mesafeyi gösterirken A-B faz ilişkisi dönüş yönünü gösterir.
Bazı döner artımlı kodlayıcılar, mil belirli bir açıdan geçtiğinde bir darbe yayan ek bir "indeks" çıkışına (genellikle Z olarak etiketlenir) sahiptir. Her dönüşte Z sinyali, bir sonraki AB durumu değişikliğine kadar genellikle her zaman aynı açıda ileri sürülür. Bu, genellikle radar sistemlerinde ve kodlayıcı mili belirli bir referans açısına yerleştirildiğinde kayıt sinyali gerektiren diğer uygulamalarda kullanılır.
Mutlak kodlayıcıdan farklı olarak, artımlı kodlayıcı izlemez ve çıkışları bağlı olduğu mekanik sistemin mutlak konumunu göstermez. Sonuçta, herhangi bir özel andaki mutlak konumu belirlemek için mutlak konumun genellikle çift yönlü bir elektronik sayacı olan artımlı kodlayıcı arayüzü ile "izlenmesi" gerekir.
Mekanik bilgisayar farelerinde ucuz artımlı kodlayıcılar kullanılır. Genellikle biri sol-sağ hareketi algılamak için, diğeri ise ileri-geri hareketi algılamak için iki kodlayıcı kullanılır.
Döner (Açılı) Darbe Kodlayıcı
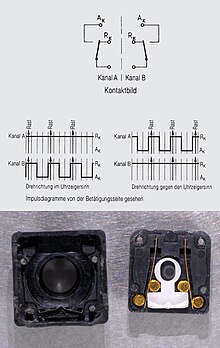
Döner (Açılı) Darbe kodlayıcının her yön için bir SPDT anahtarı vardır ve her biri yalnızca hareket yönünde çalışır. Bir yöndeki her dönüş girintisi, o yönle ilişkili SPDT anahtarının yalnızca geçiş yapmasına neden olur.
Diğer darbe çıkışlı döner kodlayıcılar
Tek çıkışlı döner kodlayıcılar (yani takometreler) hareket yönünü algılamak için kullanılamaz ancak hareket yönü sabit olduğunda hızı ölçmek ve konumu ölçmek için uygundur. Bazı uygulamalarda hareket mesafesini ölçmek için kullanılabilirler (örn. hareketli ayaklar).
Ayrıca bakınız
- Benzer işlevi yapan analog cihazlar arasında senkro, çözücü, döner değişken diferansiyel transformatör (RVDT) ve döner potansiyometre vardır.
- Doğrusal kodlayıcı döner kodlayıcıya benzer ancak konumu veya hareketi dönüş yerine düz çizgide ölçer. Doğrusal kodlayıcılar sıklıkla artımlı kodlamayı kullanır ve birçok takım tezgahında kullanılır.
Kaynakça
- ^ Murray, Mike (15 Aralık 2019). "How Rotary Encoders Work". The Geek Pub. 3 Eylül 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 3 Eylül 2019.
- ^ "New - Rotary Encoder". 5 Ekim 2013 tarihinde kaynağından arşivlendi. Canon video camera lens, used for zoom and aperture control
- ^ "A Designer's Guide to Encoders". digikey.com. 19 Nisan 2012. 24 Kasım 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 23 Kasım 2019.
- ^ "MassMind Magnetic High Speed Non-Contact Quadrature Encoder V2". MassMind.org. 10 Ocak 2018. 3 Temmuz 2019 tarihinde kaynağından arşivlendi. Erişim tarihi: 12 Temmuz 2019.
- ^ Eitel, Elisabeth. Basics of rotary encoders: Overview and new technologies 7 Mart 2023 tarihinde Wayback Machine sitesinde arşivlendi. | Machine Design Magazine, 7 May 2014. Accessed: 30 June 2014
- ^ TI-5000EX Serial/Incremental Encoder Test System User Manual[], Mitchell Electronics, Inc.
- ^ G. K. McMillan, D.M. Considine (ed.) Process Instruments and Controls Handbook Fifth Edition, McGraw Hill 1999, 978-0-07-012582-7, page 5.26
- ^ "encoders" (PDF). s. 12. 19 Eylül 2009 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 20 Şubat 2013.
- ^ "Capacitive Absolute Encoder" (PDF). Camille Bauer. 9 Kasım 2013 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 20 Şubat 2013.
- ^ Robert, Repas. "Multi-turn absolute encoders". machinedesign.com. 29 Eylül 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 20 Şubat 2013.
- ^ "New technology yields encoder that never forgets". journal. www.motioncontrol.co.za. 2007. 2 Şubat 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 20 Şubat 2013.
- ^ "White Paper Magnetic Encoder" (PDF). FRABA Inc. s. 3. 9 Kasım 2013 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 13 Şubat 2013.
- ^ Collins, Danielle. "What is a sine encoder (aka sine-cosine encoder)?". Design World. 8 Ekim 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 19 Ağustos 2020.
Daha fazla okumak için kaynaklar
- "Shaft Angle Encoders Afford High Accuracy" (PDF). Electronic Industries. 18 (10). Chilton Company. Ekim 1959. ss. 76-80. Erişim tarihi: 14 Ocak 2018.
- Military Handbook: Encoders - Shaft Angle To Digital (PDF). Savunma Bakanlığı (Amerika Birleşik Devletleri). 30 Eylül 1991. MIL-HDBK-231A. 25 Temmuz 2020 tarihinde kaynağından arşivlendi (PDF). Erişim tarihi: 25 Temmuz 2020. (NB. Supersedes MIL-HDBK-231(AS) (1970-07-01).)
Dış bağlantılar
- "Kod tekerleği seçme: Kodlayıcıların nasıl çalıştığına ayrıntılı bir bakış" 22 Mayıs 2022 tarihinde Wayback Machine sitesinde arşivlendi. Steve Trahey'nin 2008-03-25 tarihli makalesinde "döner kodlayıcılar" anlatılmaktadır.
- Jack Ganssle'ın 2005-07-19 tarihli "Kodlayıcılar yer duygusu sağlar" makalesinde "doğrusal olmayan kodlayıcılar" anlatılmaktadır.
- "Robot Kodlayıcıları".
- PWM ve Dörtlü Kodlama Konusunda Giriş Eğitimi.
- Revotics - Understanding Quadrature Encoding - Robotik uygulamalara odaklanarak döner ve karesel kodlamanın ayrıntılarını işler.
- Döner Kodlayıcı Nasıl Çalışır? - Döner kodlayıcının nasıl çalıştığını ve bunun bir Arduino mikrokontrolcüsü ile nasıl kullanılacağını gösteren video açıklaması.