Asenkron motor

Endüksiyon motoru veya asenkron motor, rotordaki torku oluşturan elektrik akımının stator sargısının manyetik alanından elektromanyetik indüksiyonla elde edildiği bir AC elektrik motorudur.[1] Bu nedenle endüksiyon motorunun rotora elektrik bağlantısına ihtiyacı yoktur.[a] Endüksiyon motorunun rotoru, sarılı tip veya sincap kafesli tip olabilir.
Üç fazlı sincap kafesli endüksiyon motorları, kendi kendine başlayan, güvenilir ve ekonomik oldukları için endüstriyel motorlar olarak yaygın kullanılır. Tek fazlı endüksiyon motorları, çöp öğütücüler ve sabit elektrikli aletler gibi daha küçük yükler için yaygın kullanılır. Geleneksel olarak sabit hızlı hizmet için kullanılsa da, tek ve üç fazlı endüksiyon motorları, değişken frekanslı tahrikler (VFD) kullanan değişken hızlı uygulamalara giderek daha fazla kurulmaktadır. VFD, fanlar, pompalar ve kompresörler gibi değişken yüklü uygulamalarda endüksiyon motorları için enerji tasarrufu fırsatları sunar.

Tarihçe


1824'te, Fransız fizikçi François Arago döner manyetik alan varlığını formüle etti. El ile açılıp kapanan devirler Arago devirleri olarak isimlendirildi. 1879 yılında Walter Baily ilk ilkel asenkron motorunun etkilerini gösterdi. İlk alternatif akımlı kollektörsüz indüksiyon motorunu birbirlerinden bağımsız olarak icat eden Galileo Ferrais ve Nicola Tesla'nın, sırasıyla 1885 ve 1887'de motor modelleme çalışmaları ortaya kondu. 1887'nin Ekim ve Kasım aylarında, Tesla amerikan patent enstitüsüne başvurdu ve bu patentlerden bazıları mayıs 1888 de onaylandı. Nisan 1888'de, the Royal Academy of Science of Turin Ferrais'in alternatif akım fazlı motorların çalışması üzerindeki araştırmalarını detaylarıyla birlikte yayınladı. Tesla mayıs 1888'de, ilki dört kutuplu rotor formundaki kendi kendini yeniden başlatamayan relüktans motor, ikincisi bilezikli motor formundaki kendini başlatabilen relüktans motor ve üçüncüsü yabancı uyartımlı doğru akım kaynağıyla beslenen gerçek zamanlı sarma motor olmak üzere üç dört-stator-kutuplu motor çeşidini tanımlayan A New System for Alternating Current Motors and Transformers isimli teknik bildirgeyi Amerikan Elektrik Mühendisleri Enstitüsü'ne(AIEE) gönderdi. Tesla' patentlerine lisans verildiği dönemde alternatif akım güç sistemleri geliştiren George Westinghouse, asenkton motor kavramı üzerine bir patentini ve buna uygun sistemi geliştirmek üzere Tesla'yı danışman olarak bir yıllık işe aldı. Teslaya yardımcı olmak için atanan Westinghouse çalışanı C.F. Scott daha sonra indüksiyon motoru geliştirilmesini devraldı. Üç fazlı gelişime de kararlılığıyla, Michail Dolivo-Dobrovolsky1889 da kafes rotorlu indüksiyon motoru ve 1890 da üç bacaklı dönüştürücüyü icat etti. Fakat,,iki fazlı pulsasyonları yüzünden Tesla'nın motorunun kullanışlı olmadığını iddia etti ve üç fazlı çalışmalarına devam etmekte ısrar etti. Westinghouse 1892'de ilk kullanışlı indüksiyon motoru elde edip, 1893'te çok fazlı 60 hertz indüksiyon motorları için bir hat geliştirmesine rağmen, Westinghouse'un ilk motorları, B.G. Lamme dönen çubuklu rotor sargısını geliştirene dek bilezikli iki fazlı motorlardı. 1891'de General Electric Company üç-fazlı indüksiyon motorları geliştirmeye başladı. 1896 suretiyle, General Electric ve Westinghouse daha sonra sincap kafesli rotor olarak adlandırılan çubuk-sarma-rotor tasarımı için bir çapraz lisans anlaşması imzaladı. Arthur E. Kennelly, AC sorunların karmaşık sayı analizinde 90 derece döndürme operatörünü belirlemek için ''i''(kök içinde eksi bir) harfinin anlamını ilk kez açığa kavuşturan oldu. Charles Proteus Steinmetz artık daha çok indüksiyon motorun Steinmetz eşdeğer devresi olarak bilinen AC karmaşık büyüklüklerinin uygulanmasını büyük orandan geliştirdi. Günümüz bağlantı boyutları 1897'deki 7.5 beygirgücü motoruyla aynı olan 100-beygir gücü indüksiyon motor gibi buluş ve yeniklerle indüksiyon motorun gelişimi devam etti.
Çalışma prensipleri
3-fazlı motor


Hem endüksiyon hem de senkron motorlarda, motorun statoruna verilen AC gücü, AC salınımlarıyla eş zamanlı dönen manyetik bir alan yaratır. Senkron bir motorun rotoru stator alanıyla aynı hızda dönerken, endüksiyon motorunun rotoru stator alanından biraz daha yavaş hızda döner. Bu nedenle endüksiyon motor statorunun manyetik alanı rotora göre değişir veya döner. Bu, rotorda, aslında motorun sekonder sargısında zıt bir akım oluşturur.[2] Dönen manyetik akı, transformatörün sekonder sargısında/sargılarında oluşan akımlara benzer şekilde, rotor sargılarında akımlar oluşturur.[3]
Rotor sargılarındaki indüklenen akımlar, rotorda stator alanına karşı tepki veren manyetik alanlar yaratır. Rotor manyetik alanının yönü, Lenz yasası'na göre rotor sargılarından geçen akımdaki değişime karşı koyar. Rotor sargılarındaki indüklenen akımın nedeni dönen stator manyetik alanıdır, bu nedenle rotor sargı akımlarındaki değişime karşı koymak için rotor stator manyetik alanının yönünde döner. Rotor, indüklenen rotor akımının ve torkun büyüklüğü rotordaki yükü dengeleyene kadar hızlanır. Senkron hızda dönüş rotor akımını indüklemediğinden, endüksiyon motoru her zaman senkron hızdan biraz daha yavaş çalışır. Gerçek ve senkron hız arasındaki fark veya "kayma", standart Tasarım B tork eğrisi endüksiyon motorları için yaklaşık %0,5 ila %5,0 arasındadır.[4] Endüksiyon motorunun temel özelliği, senkron veya DC makinelerde olduğu gibi rotorun ayrı olarak uyarılması veya kalıcı mıknatıslı motorlarda olduğu gibi kendi kendine mıknatıslanması yerine, torkun yalnızca endüksiyon tarafından yaratılmasıdır.[2]
Rotor akımlarının indüklenmesi için fiziksel rotorun hızı, statorun dönen manyetik alanından daha az olmalıdır (). Aksi takdirde manyetik alan rotor iletkenlerine göre hareket etmeyecek ve akım indüklenmeyecektir. Rotorun hızı senkron hızın altına düştükçe, rotordaki manyetik alanın dönüş hızı artar, sargılarda daha fazla akım indüklenir ve daha fazla tork oluşur. Rotorda indüklenen manyetik alanın dönüş hızı ile statorun dönen alanının dönüş hızı arasındaki orana "kayma" denir. Yük altında hız düşer ve kayma yükü döndürmek için yeterli tork yaratacak kadar artar. Bu nedenle, endüksiyon motorlarına bazen "asenkron motorlar" denir.[5]

Endüksiyon motoru, endüksiyon jeneratörü olarak kullanılabilir veya doğrudan doğrusal hareket üretebilen doğrusal bir endüksiyon motoru oluşturmak için açılabilir. Endüksiyon motorları için üretim modu, yalnızca kalıntı mıknatıslanma ile başlayan rotoru uyarma ihtiyacı nedeniyle karmaşıktır. Bazı durumlarda, bu kalıntı mıknatıslanma, yük altında motoru kendi kendine uyarmak için yeterlidir. Bu nedenle, motoru ya durdurup anlık olarak canlı bir şebekeye bağlamak ya da başlangıçta kalıntı mıknatıslanma ile yüklenen ve çalışma sırasında gerekli reaktif gücü veren kapasitörler eklemek gerekir. Endüksiyon motorunun, güç faktörü kompanzatörü olarak görev yapan senkron bir motorla paralel çalışması da benzerdir. Şebekeye paralel jeneratör modundaki bir özellik, rotor hızının sürüş modundakinden daha yüksek olmasıdır. Daha sonra şebekeye aktif enerji verilir.[6] Endüksiyon motor jeneratörünün bir diğer dezavantajı da önemli bir mıknatıslama akımı I0 = (20–35)% tüketmesidir.
Senkron hız
Bir AC motorunun senkron hızı , statorun manyetik alanının dönüş hızıdır.

- ,

burada güç kaynağının frekansı, manyetik kutup sayısı ve makinenin senkron hızıdır. hertz ve senkron hızı RPM için formül şu hale gelir:



Örneğin, dört kutuplu, üç fazlı bir motor için, = 4 and = 1,500 RPM ( = 50 Hz için) ve 1,800 RPM ( = 60 Hz için) senkron hızıdır.

Manyetik kutup sayısı, , faz başına kuzey ve güney kutuplarının sayısıdır. Örneğin; 3 kuzey ve 3 güney kutbu olan ve faz başına 6 kutbu olan tek fazlı bir motor 6 kutuplu bir motordur. 18 kuzey ve 18 güney kutbu olan ve faz başına 6 kutbu olan üç fazlı bir motor da 6 kutuplu bir motordur. Kutupları saymanın bu endüstri standardı yöntemi, polariteye bakılmaksızın belirli bir frekans için aynı senkron hızın elde edilmesini sağlar.
Asenkron motor asla senkron hızda dönmez. Böylece dönme hızı alt senkron hız ve asenkron motor olarak adlandırılır.[9]
Kayma

Kayma, , senkron hızı ve çalışma hızı arasındaki fark olarak tanımlanır, aynı frekansta rpm ya da yüzde senkron hız oranını gösterir. Bu nedenle,


burada stator elektriksel hızı, ise rotordaki mekanik hızı simgeler. Kayma, senkron hızda sıfırdan değişir ve 1 rotor durduğunda rotorun torkunu belirler. Kısa devre rotor sargıları küçük bir direnç olduğundan, küçük bir kayma rotorda büyük bir akım indükler ve büyük bir tork üretir.[10] Tam nominal yükte, kayma küçük ya da özel amaçlı motorlarda % 5'ten fazla değişmesine karşın büyük motorlar için bu değişim %1 den azdır.[11] Farklı büyüklükteki motorlar mekanik olarak bağlandığında bu hız değişimleri yük paylaşma sorunlarına neden olabilir. Kaymayı azaltmak için kullanılabilinecek çeşitli yöntemler vardır, VDFler ise genellikle en iyi çözümü sunar.[11][11]

Tork
Standart tork


Standart bir NEMA Tasarım B çok fazlı endüksiyon motorunun tipik hız-tork ilişkisi sağdaki eğride gösterildiği gibidir. Santrifüj pompalar ve fanlar gibi düşük performanslı yüklerin çoğu için uygun olan Tasarım B motorları, aşağıdaki tipik tork aralıklarıyla sınırlıdır:[4][b]
- Arıza torku (tepe tork), nominal torkun %175–300'ü
- Kilitli rotor torku (yüzde 100 kaymadaki tork), nominal torkun %75–275'i
- Çekme torku, nominal torkun %65–190'ı.
Bir motorun normal yük aralığı üzerinde, torkun eğimi yaklaşık olarak doğrusaldır veya kaymaya orantılıdır çünkü rotor direncinin kaymaya bölünen değeri, , torku doğrusal bir şekilde domine eder.[12] Yük, nominal yükün üzerine çıktıkça, stator ve rotor kaçak reaktans faktörleri ile ilişkili olarak giderek daha önemli hale gelir, böylece tork giderek bozulma torkuna doğru eğilir. Yük torku bozulma torkunun ötesine çıktığında motor durur.

Başlangıç
Küçük endüksiyon motorlarının üç temel tipi vardır: ayrık fazlı tek fazlı, gölge kutuplu tek fazlı ve çok fazlı.
İki kutuplu tek fazlı motorlarda, tork %100 kaymada (sıfır hız) sıfıra iner, bu nedenle bunlar başlangıç torku sağlamak için gölgeli kutuplar gibi statorda değişiklikler gerektirir. Tek fazlı bir endüksiyon motoru, motora dönen bir alan sağlamak için ayrı bir başlangıç devresi gerektirir. Bu tür tek fazlı motordaki normal çalışan sargılar rotorun her iki yönde de dönmesine neden olabilir, bu nedenle başlangıç devresi çalışma yönünü belirler.

Fazlı motorlar bir etki olmadan kendinden başlayabilmelerine rağmen, pull-up tork tasarım sınırları gerçek yük koşulları aşmak için yeteri kadar yüksek olmalıdır.
Bazı daha küçük tek fazlı motorlarda, başlatma, bir kutbun bir kısmı etrafında bakır bir telin döndürülmesiyle yapılır; böyle bir kutba gölgeli kutup denir. Bu dönüşte indüklenen akım, besleme akımının gerisinde kalır ve kutup yüzünün gölgeli kısmı etrafında gecikmeli bir manyetik alan oluşturur. Bu, motoru çalıştırmak için yeterli dönme alanı enerjisi sağlar. Bu motorlar genellikle masa vantilatörleri ve plak çalarlar gibi uygulamalarda kullanılır, çünkü gereken başlatma torku azdır ve az verimlilik, diğer AC motor tasarımlarına kıyasla motorun ve başlatma yönteminin azaltılmış maliyetine göre tolere edilebilir.
Daha büyük tek fazlı motorlar, bölünmüş fazlı motorlardır ve faz dışı akımla beslenen ikinci bir stator sargısı vardır; bu tür akımlar, sargının bir kapasitörden geçirilmesi veya ana sargıdan farklı endüktans ve direnç değerleri almasıyla oluşturulabilir. Kapasitör başlatma tasarımlarında, motor hıza ulaştığında ikinci sargı, genellikle motor şaftındaki ağırlıklar üzerinde etki eden bir santrifüj anahtarı veya ısınan ve direncini artıran ve ikinci sargıdan geçen akımı önemsiz bir seviyeye düşüren bir termistör tarafından kesilir. Kapasitör çalıştırma tasarımları, çalışırken ikinci sargıyı açık tutarak torku iyileştirir. Direnç başlatma tasarımı, reaktans oluşturan başlatma sargısıyla seri olarak yerleştirilen bir marş kullanır.
Kendiliğinden başlayan çok fazlı endüksiyon motorları, dururken bile tork üretir. Mevcut sincap kafesli endüksiyon motor başlatma yöntemleri arasında doğrudan çevrimiçi başlatma, düşük voltajlı reaktör veya otomatik transformatör başlatma, yıldız-üçgen başlatma veya giderek artan şekilde yeni katı hal yumuşak montajlar ve tabii ki değişken frekanslı sürücüler (VFD'ler) bulunur.[13]
Çok fazlı motorlar, farklı hız-tork karakteristikleri verecek şekilde şekillendirilmiş rotor çubuklarına sahiptir. Rotor çubukları içindeki akım dağılımı, indüklenen akımın frekansına bağlı olarak değişir. Durma halinde, rotor akımı stator akımıyla aynı frekanstadır ve kafes rotor çubuklarının en dış kısımlarında (Yüzey katmanı etkisiyle) hareket etme eğilimindedir. Farklı çubuk şekilleri, başlangıçta ani akım üzerinde bir miktar kontrol sağlamanın yanı sıra faydalı bir şekilde farklı hız-tork karakteristikleri de sağlayabilir.
Çok fazlı motorlar doğası gereği kendiliğinden başlatılsa da, başlatma ve çekme torku tasarım sınırları gerçek yük koşullarının üstesinden gelebilecek kadar yüksek olmalıdır. Sarılmış rotorlu motorlarda, rotor devresinin kayar halkalar aracılığıyla harici dirençlere bağlanması, hızlanma kontrolü ve hız kontrolü amaçları için hız-tork özelliklerinin değiştirilmesine olanak tanır.
Hız Kontrolü
Direnç

Yarı iletken güç elektroniğinin geliştirilmesinden önce, frekansı değiştirmek zordu ve kafes endüksiyon motorları esasen sabit hız uygulamalarında kullanılıyordu. Elektrikli köprülü vinçler gibi uygulamalarda, değişken dış dirence rotor devresi bağlantısı için kayar halkalı DC sürücüler veya sarılı rotorlu motorlar (WRIM) kullanılır ve bu da önemli bir hız kumanda aralığı sağlar. Ancak, WRIM'lerin düşük hızlı çalışmasıyla ilişkili direnç kayıpları, özellikle sabit yükler için büyük bir maliyet dezavantajıdır.[14] Kayma enerjisi geri kazanım sistemleri olarak adlandırılan ve bazıları hala kullanımda olan büyük kayar halkalı motor sürücüleri, rotor devresinden enerjiyi geri kazanır, düzeltir ve bir VFD kullanarak güç sistemine geri döndürür.
Yapı

Bir indüksiyon motor statoru manyetik alan oluşturmak için nüfuz eden besleme akımı taşıyan kutuplardan oluşur. Manyetik alan dağılımını optimize etmek için, sargılar stator çevresindeki yuvalara dağıtılır. Burada manyetik alan aynı sayıda kuzey ve güney kutuplara sahiptir. Indüksiyon motorları en yaygın tek fazlı veya üç fazlı güçle çalıştırılır, ancak iki-fazlı da motorlar vardır; teoride, asenkron motorlar fazları herhangi bir sayı olabilir. Çok sayıda iki sarımlı tek fazlı motorlar iki fazlı motor olarak incelenebilir. Bu nedenle kapasitör ikinci bir güc faz tek fazlı güç kaynağından 90 derece oluşturmak için kullanılır ve ikinci motor sarımını besler. Tek fazlı motorlar başlangıçta bir döner alan üretmek için bazı mekanizmalar gerektirir. Kafesli asenkron motor rotor iletken çubuklar genellikle gürültüyü azaltmak için eğridir.
Ters döndürme
Bir indüksiyon motorun dönüş yönünü değiştirme yöntemi üç fazlı veya tek fazlı bir makine olup olmamasına göre değişir. Bu durumda üç fazlı için, ters döndürme herhangi iki fazın iletken bağlantısı değiştirilerek yürütülmektedir. Bir tek fazlı bölünmüş fazlı motorda, bu başlangıç devresi ve birincil sarmal arasındaki bağlantı ile elde edilir. Tek fazlı bölünmüş fazlı motorlar birincil sarmalı ve içten bağlantılı başlangıç devresi birbiriyle bağlantılı uygulamalar için tasarlanmıştır. Böylece rotasyon değiştirilemez. Ayrıca, tek fazlı gölgeli kutuplu motorlar sabit rotasyona sahiptir ve yönleri değiştirilemez.
Güç faktörü
Bu güç faktörü indüksiyon motorlarda yük ile değişir, genel olarak bu 0.85 iken tam yüklü konumda 0.90, stator ve rotor kaçak ve mıknatıslanma reaktansları nedeniyle yüksüzden düşük yüklü konuma kadar 0.12 dir.[15] Güç faktörü bağlanan kapasitörler yoluyla tek motor bazında veya, tercihen, ortak bir veri yolu üzerindeki birkaç motorları içeren şekilde geliştirilebilir. Ekonomik ve diğer hususlar için, güç sistemleri nadiren güç kuvvetler birliğini doğrulayan güç faktörleridir. [16] Kapasitörler, transformatör ve devre reaktansları arasındaki harmonik rezonans önlemek için güç kondansatör uygulaması ile harmonik akım, güç sistem analizi gerektirir. [17] Rezonans riskini en aza indirmek ve güç sistem analizini basitleştirmek için ortak veriyolu güç faktörü düzeltmesi tavsiye edilir.[17]
Verimlilik
(Ayrıca bakınız Energy savings)
Tam yük motor verimi yaklaşık %85 ile %97 arasında değişir, kabaca motor kayıplarıyla ilgili bozunumlar aşağıdaki gibidir:
- Sürtünme ve rüzgarlama,% 5 -% 15
- Demir veya nüve kayıpları,% 15 -% 25
- Stator kayıpları,% 25 -% 40
- Rotor kayıpları,% 15 -% 25
- Kaçak yük kayıpları,% 10 -% 20.
Birçok ülkede farklı düzenleyici kurumlar yüksek verimli elektrik motor kullanımına teşvik etmek için kanunlar düzenleyip uyguladı. Mevcut ve gelecek yasamalar premium verimli indüksiyon tipi motorların tanımlanan cihazlarda kullanılmasını zorunlu kıldı. Daha fazla bilgi için, bkz: Enerji tasarruflu motorlarda bakır ve Premium verimlilik
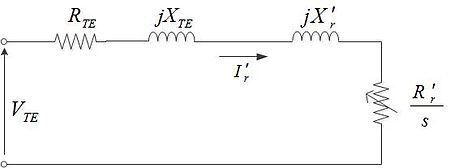
Steinmetz eşdeğer devresi
Birçok kullanışlı zaman, akım voltaj, hız, güç faktörü ve tork ile motor arasındaki ilişkilendirme Steinmetz (ayrıca T-eşdeğer devresi olarak ya da IEEE önerilen eşdeğer denklemi olarak adlandırılan) eşdeğer devresinden yapılanmıştır. Aynı zamanda, indüksiyon motorlarda elektrik girişi nasıl mekanik enerji çıkışına dönüşür sorusunu cevaplamada matematiksel bir model olarak kullanılmıştır. Eşdeğer devre çok fazlı indüksiyon motorların tek fazlı gösterimlerinde kararlı-hal dengeli-yük koşullarında geçerlidir..
Steinmetz eşdeğer devre basitçe aşağıdaki bileşenleri bakımından ifade edilir:
- Stator direnç and kaçak reaktans (, ).
- Rotor direnç, kaçak reaktans ve kayma (, or , , ve ).
- Magnetizan reaktans ().







Alger in Knowlton'un yeniden yorumlamasına göre, bir indüksiyon motor basitçe manyetik devresi stator sarmalı ve hareketli rotor sarmalı hava boşluğuyla ayrılmış bir elektrik transformatörüdür. Buna göre eşdeğer devre, ideal bir transformatör ile ayrılmış sargılar eşdeğer devre elemanlarıyla gösterildiği gibi aşağıdaki devrede, devreyle bağlantılı denklem ve parametre tanımlarının bulunduğu tablo ile de gösterilir. [13][16][18][19][20][21]

| Devre Parametre Tanımları | ||
|---|---|---|
| Birimler | ||
| stator senkron frekansı | Hz | |
| dakikadaki devir rotor hızı | rpm | |
| dakikadaki devir senkron hızı | rpm | |
| stator ya da birincil akım | A | |
| rotor ya da ikincil akım | A | |
| mıknatıslanma akımı | A | |
| karmaşık sayı, ya da 90° döndürme , operatör | ||
| Thévenin reaktans faktörü | ||
| motor faz sayısı | ||
| motor kutup sayısı | ||
| elekromekanikal güç | W or hp | |
| hava boşluğu gücü | W | |
| rotor bakır kayıpları | W | |
| giriş gücü | W | |
| çekirdek kaybı | W | |
| sürtünme ve rüzgarlama kaybı | W | |
| çalışan ışık watt giriş | W | |
| kaçak yük kaybı | W | |
| stator yani birincil direnç ve kaçak reaktans | Ω | |
| rotor ya da ikincil direnci & stator tarafında belirtilen kaçak reaktans | Ω | |
| direnç & motor girişindeki kaçak reaktans | Ω | |
| Thévenin direnç eşitliği & kaçak reaktans birleşimi, and | Ω | |
| kayma (sekme) | ||
| elektromanyetik tork | Nm or ft.-lb. | |
| nominal tork | Nm or ft.-lb. | |
| etkilenmiş stator faz voltajı | V | |
| mıknatıslanma reaktansı | Ω | |
| Ω | ||
| stator veya birincil empedansı | Ω | |
| rotor ya da ikincil empedansı birincilde adlandırılan | Ω | |
| motor statoru empedansı ya da birincil giriş | Ω | |
| rotor birleşimi ya da ikincil ve manyetize empedans | Ω | |
| Thévenin eşitliği devrem empedansı, | Ω | |
| rotor hızı | rad/s | |
| senkron hızı | rad/s | |
| mho | ||
| Ω | ||




































Aşağıdaki başparmak kuralı yaklaşımların devrede uygulanışı bulunmaktadır:[21][22][23]
- Maksimum akım olur altında kilitli rotor akımı (LRC) Koşulları ve biraz daha az , LRC genellikle arasında değişen 6 ve 7 kez anma akımı için standart uygulama B motorlar.[4]
- Arıza tork olduğunda ve böyle olduğunu ve bu nedenle, sabit voltaj girişi, düşük kayma asenkron motorun yüzde oranlı maksimum tork yaklaşık yarım yüzde puan LRC.
- Akraba statör rotor kaçak tepki standart Tasarım B kafes asenkron motorlar vardır[20]




- .

- İhmal statör direnci, bir asenkron motorun tork eğrisini Kloss denklemine göre azaltır.[24]
- burada , anındaki kaymadır.


| Temel Elekriksel Denklikler | ||
|---|---|---|
Stator akım
| ||




| Güç Denklikleri | ||
|---|---|---|
Steinmetz devre denkliğinden,
Rotor hızı açısından elektromekanik güç çıkışını ifade eden
ft.-lb olarak ifade edilir .:
| ||









| Tork Denklemleri | ||
|---|---|---|
 olduğunda ve , ve
Foot-pound biriminde;
| ||


















Notlar
- ^ Yani, üniversal, DC motor ve senkron motorlarda olduğu gibi statordan rotora aktarılan enerjinin tamamı veya bir kısmı için mekanik komütasyon, ayrı uyartım veya öz uyartım yoktur.
- ^ NEMA MG-1, a) arıza torkunu, nominal frekansta nominal gerilim uygulanarak motorda ani bir hız düşüşü olmaksızın geliştirilen maksimum tork, b) kilitli rotor torkunu, nominal frekansta nominal gerilim uygulanarak motorda hareketsiz durumda geliştirilen minimum tork ve c) çekme torkunu, durma noktasından arıza torkunun oluştuğu hıza ivmelenme süresince motorda geliştirilen minimum tork olarak tanımlar.
Doğrusal indüksiyon motor
Doğrusal indüksiyon motorlar, döner indüksiyon motorlarda olduğu gibi genel prensiple çalışırlar, genellikle üç fazlıdırlar ve doğrusal hareket üretmek için tasarlanmıştır. Manyetik kaldırma, doğrusal itme gücü, doğrusal aktüatörler ve sıvı pompalama kullanıldığı alanlardır.
Kaynakça
- Genel
- Bailey, Benjamin Franklin (1911). The Induction Motor. McGraw-Hill. 23 Şubat 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 24 Mayıs 2016.
- Behrend, Bernhard Arthur (1901). The Induction Motor: A Short Treatise on its Theory and Design, With Numerous Experimental Data and Diagrams. McGraw Publishing Company / Electrical World and Engineer.
- Boy de la Tour, Henri (1906). The Induction Motor: Its Theory and Design, Set Forth By a Practical Method of Calculation. Translated Cyprien Odilon Mailloux. McGraw Pub. Co. 23 Şubat 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 24 Mayıs 2016.
- Atıflar
- ^ IEC 60050 (Publication date: 1990-10). Section 411-31: Rotation Machinery – General, IEV ref. 411-31-10: "Induction Machine – an asynchronous machine of which only one winding is energized". 6 Ocak 2019 tarihinde Wayback Machine sitesinde arşivlendi.
- ^ a b Alger, Philip L. (3 Eylül 2013). "'Induction Machines' sub-section of Sec. 7 – Alternating-Current Generators and Motors". Beaty, H. Wayne; Fink, Donald G. (Ed.). Standard Handbook for Electrical Engineers Sixteenth Edition (İngilizce) (16 bas.). McGraw Hill Professional. ISBN 978-0-07-176231-1.
- ^ "AC Motors". NSW HSC Online – Charles Sturt University. 30 Ekim 2012 tarihinde kaynağından arşivlendi. Erişim tarihi: 2 Aralık 2012.
- ^ a b c NEMA MG-1 2007 Condensed (2008). Information Guide for General Purpose Industrial AC Small and Medium Squirrel-Cage Induction Motor Standards. Rosslyn, Virginia US: NEMA. s. 29 (Tablo 11). 31 Ocak 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 2 Aralık 2012.
- ^ "Induction (Asynchronous) Motors" (PDF). Mississippi State University Dept of Electrical and Computer Engineering, Course ECE 3183, 'Electrical Engineering Systems for non-ECE majors'. 15 Mayıs 2016 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 2 Aralık 2012.
- ^ Kaynak hatası: Geçersiz
<ref>etiketi;Babbage (1825)isimli refler için metin sağlanmadı (Bkz: ) - ^ "Induction Motors". electricmotors.machinedesign.com. Penton Media, Inc. 16 Kasım 2007 tarihinde kaynağından arşivlendi. Erişim tarihi: 12 Nisan 2016.
- ^ "Motor Formulas". elec-toolbox.com. 8 Mayıs 1999 tarihinde kaynağından arşivlendi. Erişim tarihi: 1 Ocak 2013.
- ^ Slip in Asynchronous Motor - www.electricaldeck.com
- ^ Herman, Stephen L. (2011).
- ^ a b c Peltola, Mauri.
- ^ Keljik, Jeffrey (2009). "Chapter 12 – The Three-Phase, Squirrel-Cage Induction Motor". Electricity 4 : AC/DC Motors, Controls, and Maintenance (9cu bas.). Clifton Park, NY: Delmar, Cengage Learning. ss. 112-115. ISBN 978-1-4354-0031-3.
- ^ a b Kaynak hatası: Geçersiz
<ref>etiketi;Liang (2011)isimli refler için metin sağlanmadı (Bkz: ) - ^ Jamil Asghar, M.S. (2003). "Speed control of wound rotor induction motors by AC regulator based optimum voltage control". The Fifth International Conference on Power Electronics and Drive Systems, 2003. PEDS 2003. 2. ss. 1037-1040. doi:10.1109/PEDS.2003.1283113. ISBN 978-0-7803-7885-8.
- ^ Fink, D.G.; Beaty, H.W. (1978).
- ^ a b Jordan, Howard E. (1994).
- ^ a b NEMA MG-1, p. 19
- ^ Hubert, Charles I. (2002).
- ^ Beaty, H. Wayne (Ed.) (2006).
- ^ a b Knight, Andy.
- ^ a b IEEE 112 (2004).
- ^ Alger (1949), p. 711
- ^ a b c d e Özyurt, Ç.
- ^ Hameyer, Kay (2001).
Dış bağlantılar
- Bir indüksiyon motoru çizim25 Ekim 2007 tarihinde Wayback Machine sitesinde arşivlendi.
- Dönen manyetik alanlar25 Temmuz 2010 tarihinde Wayback Machine sitesinde arşivlendi.: interaktif, (İtalyan)
- Sincap kafesli endüksiyon motoru kurumu kullanarak povray
- Asenkron motor la alakalı konular arasında Hyperphysics web sitesi (C. R. NEF, GSÜ Fizik ve Astronomi Bölümü tarafından)













{kind=link}
{kind=link}