İnsansı robot
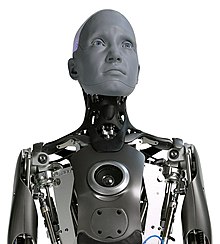
İnsansı robot, vücut şekli insan vücuduna benzemek üzere üretilen robottur. İnsansı bir tasarımın kullanılması; insanların kullandığı aletler ve çevreyle iletişim, deneysel amaçlar(çift ayaklı hareket konusunun geliştirilmesi gibi) gibi fonksiyonel amaçlar veya farklı amaçlar için olabilir. Genel olarak insansı robotlar bir baş, gövde, iki kol ve iki bacağa sahiptir. Bazı insansı robotlar insan vücudunun yalnızca bir kısmı model alınarak yapılmış olabilir, sadece bel üstü gibi. Bazı insansı robotlar, ağız ve gözler gibi uzuvlara sahip, yüz ifadeleri üretme yeteneği olan gelişmiş kafalara sahip olabilirler. Özellikle görünümsel ve özeliksel olarak insanlara benzemeleri için yapılmış robotlara android adı verilir.
Kullanım amaçları




İnsansı robotlar birçok bilim dalında araştırma aletleri olarak kullanılmaktadırlar.
İnsan vücudunun yapı ve davranışlarını (biomekanik) anlamak isteyen araştırmacılar insansı robotlar üretmek ve onları araştırmak zorundadırlar. Diğer taraftan, insan vücudunu taklit etmeye çalışmak onu daha iyi anlamayı sağlamaktadır.
İnsan Algı bilimi, insanların algıladıkları bilgiler üzerinden algısal ve motor becerileri nasıl öğrendiklerine odaklanan bir bilim dalıdır. Bu bilgi insan davranışları gösteren programlar geliştirmek için kullanılmakta ve bu bilim hızla yükselmektedir.
Yüksek teknoloji robotiğin normal insanları daha üst bir seviyeye çıkarmak için kullanılabileceği iddia edilmektedir. Bakınız transhümanizm.
İnsansı robot araştırmalarının ana gayesi insanlar için daha iyi ortez - protez üretmek olsa da, bilgi iki dal arasında geçişler yapmıştır. Birkaç örnek olarak; neromasküler olarak hasarlılar için güçlendirilmiş bacak protezi, ayak-bilekortezi, biyolojik olarak gerçekçi bacak protezi ve önkol protei verilebilir.
Araştırmanın yanı sıra, insansı robotlar kişisel yardımcılık yani yaşlı ve hastalara yardım etmek ya da pis veya tehlikeli işlerle başa çıkmak gibi insan işleri yapmak için de geliştirilmektedirler. Danışmada çalışmak veya otomotiv üretiminde işçilik yapmak gibi sıradan işler de insansı robotlar için uygun alanlardır. Özet olarak, insanlar için tasarlanmış aletl veekipmanları kullanma yeteneklerine sahip oldukları için teorik olarak doğru yazılıma sahip oldukları sürece bir insanın yapabildiği her işi yapabilme kabiliyetindedirler. Ancak bu yazılımların oluşturulmasındaki karmaşa aldatıcı derecede büyüktür.
İnsansı robotlar eğlence sektöründe de hızla ün salmaktadırlar. Univresal Stüdyolarında şarkı söyleyen, müzik çalan, dans edip izleyicilerle konuşan feminen robot Ursula bir örnektir. Birkaç Disney eğlence merkezi temalı parklarında insan gibi görünen, hareket eden, konuşan animatronları kullanır. Bu animatronlar o kadar gerçekçidirler ki belli bir uzaklıktan insan olup olmadıklarından emin olmak zor olabilir. Gerçekçi bir görünüme sahip de olsalar da bu robotlar ne bir algıya ne de fiziksel bir anatomiye sahiptirler. Çeşitli insansı robotlar ve günlük hayata olası uygulamaları Plug & Pray adlı, 2010 yılı yayınlı bağımsız belgesel-filmde sunulmuştur.
Özellikle yapay zeka ve algoritmaya sahip olan insansı robotlar, gelecekteki tehlikeli ve uzak uzay araştırmalarında, görev bitiminde dünyaya dönme ihtiyaçları olmadıkları için faydalı olabilirler.
Sensörler
Bulunduğu çevrenin niteliklerini ölçen aletlere sensör adı verilir. Robotiğin üç kökünden biri olan sensörler (diğer ikisi planlama ve kontrol olmak üzere), robotun mental modelinin çevreyi algılaması konusunda önemli bir rol oynar.
Sensörler iki şekilde sınıflandırılırlar; çalışmalarındaki fiziksel sürece veya çıktı olarak verdikleri ölçüm bilgilerinin tipine göre. Burada ikinci sınıflandırma kullanılmıştır.
Proprioseptif sensörler
Proprioseptif sensörler insansı vücut ve eklemlerin pozisyon, oryantasyon ve hızlarını algılarlar.
İnsanlarda otolitler ve yarım daire kanalları (iç kulakta) dengenin korunması ve yön belirlemeden sorumlu yapılardır. Buna ek olarak insanlar yönelme/yön belirlemeye yardımcı olmaları için kendi proprioseptif sensörlerini (örneğin dokunma, kas esnemesi, uzuv pozisyonu gibi) de kullanırlar. İnsansı robotlar ivmeyi ölçmek için, hızın integralini hesaplayan ivmeölçerleri;eğim açısını ölçmek için eğim sensörlerini; çevre ile temas güçlerini ölçmek için el ve ayaklarına yerleştirilmiş olan güç sensörlerini, bulundukları asıl konumu ölçmek için pozisyonun hızın türevi aracılığıyla hesaplandığı konum sensörlerini ve hatta hız sensörleri kullanırlar.
Kaynakça
- ^ "A Ping-Pong-Playing Terminator". Popular Science. 7 Mayıs 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Ocak 2016.
- ^ "Best robot 2009". www.neterion.com. 27 Aralık 2022 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Ocak 2016.













